|
Электроника и электротехника
Правильная ссылка на статью:
Губанова А.А., Гузаревич А.С., Таридонов Н.Е.
Блок измерения расстояний системы управления поисковым роботом
// Электроника и электротехника.
2018. № 1.
С. 27-31.
DOI: 10.7256/2453-8884.2018.1.25764 URL: https://nbpublish.com/library_read_article.php?id=25764
Блок измерения расстояний системы управления поисковым роботом
Губанова Александра Анатольевна
преподаватель, Донской государственный технический университет.
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Gubanova Aleksandra Anatol'evna
Lecturer at Don State Technical University.
344000, Russia, Rostovskaya oblast', g. Rostov-Na-Donu, Gagarina, 1

|
anatoliya81@mail.ru
|
|
 |
Другие публикации этого автора
|
|
Гузаревич Александра Сергеевна
.
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Guzarevich Aleksandra Sergeevna
.
344000, Russia, Rostovskaya oblast', g. Rostov-na-Donu, Gagarina, 1
|
|
anatoliya81@mail.ru
|
|
 |
Другие публикации этого автора
|
|
|
Таридонов Никита Евгеньевич
.
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Taridonov Nikita Evgen'evich
.
344000, Russia, Rostovskaya oblast', g. Rostov-na-Donu, Gagarina, 1
|
|
anatoliya81@mail.ru
|
|
|
Другие публикации этого автора
|
|
|
DOI: 10.7256/2453-8884.2018.1.25764
Дата направления статьи в редакцию:
18-03-2018
Дата публикации:
28-03-2018
Аннотация:
Решение задачи определения расстояния в системе автономной навигации мобильной робототехнической системы имеет важное практическое значение. Для автономного движения робот должен обладать системой навигации, на основании результатов измерений которой предотвращаются его с различными препятствиями. В данной работе демонстрируется система управления блоком измерения расстояний поискового робота. На практике различного рода робототехнические системы, как правило, движутся хаотично. Для организации автономного движения мобильного робота необходимо оснащение его измерительными датчиками и интеллектуальной системой обработки, препятствующие столкновению робота с препятствиями. В статье рассмотрен принцип, основанный на анализе результатов измерений ультразвуковым датчиком расстояний от робота (датчика) до впереди стоящего препятствия как в статическом положении, так и в процессе движения робота. Новизна работы заключается в том, что наличие препятствия в направлении движения робота определяется по времени прихода отраженного радиоимпульса, излученного и принятого датчиком в ультразвуковом диапазоне частот.В ходе работы был разработан блок измерения расстояний системы управления поисковым роботом. В проекте представлены структурная, функциональная и принципиальная схемы. Данная разработка позволит с большей точностью и скоростью обследовать помещения в поисках опасных предметов или пострадавших людей, что позволит уменьшить вероятность их гибели. Кроме того, возможны другие сферы применения системы мобильных роботов: картографирование, охрана помещений, выполнение вспомогательных работ в здании (уборка, перемещение грузов) и т.п.
Ключевые слова:
навигация, управление движением, контроллер, мобильный робот, расстояние до препятствия, ультразвуковой приемник, отражение сигнала, прерывания микропроцессора, излучатель, приемник
Abstract: Solving the problem of determining the distance in the autonomous navigation system of a mobile robotic system is of great practical importance. For autonomous movement the robot must have a navigation system whose measurements prevent it from collisions with various obstacles. This paper demonstrates the control system of the distance measurement unit of the search robot. In practice, different kinds of robotic systems tend to move chaotically. For the organization of autonomous movement of the mobile robot it is necessary to equip it with measuring sensors and an intelligent processing system that prevents the robot from colliding with obstacles. The article deals with the principle based on the analysis of measurement results by ultrasonic distance sensor from the robot (sensor) to the front of the obstacle both in a static position and in the process of robot movement. The novelty of the paper lies in the fact that presence of an obstacle in the direction of the robot’s motion is determined by the time of the arrival of the reflected radio pulse emitted and received by the sensor in the ultrasonic frequency range. The project contains structural, functional and principal schematics. This research might provide increased precision and speed during indoor search and rescue operations. Other areas of mobile robotic systems application include mapping, protection of the premises and indoor service activities (cleaning, movement of goods), etc.
Keywords: navigation, the control of the movement, controller, mobile robot, the distance to the obstacle, ultrasonic receiver, signal reflection, interrupts of microprocessor, emitter, receiver
В процессе движения робота датчик и измерительная система непрерывно осуществляют измерение расстояния до впереди стоящего препятствия. При достижении минимально допустимого порогового значения (300 мм) от робота до препятствия робот останавливается и производит замер расстояния слева и справа. Если расстояние слева оказывается больше, чем справа, робот движется в направлении наибольшего запаса движения (налево). При отсутствии беспрепятственных направлений движения осуществляется остановка робота и движение робота в обратную сторону. Измерение расстояния слева и справа от робота сопровождается вращением по кругу единичного датчика.
Планируется, что БИР будет выполнен в виде платы расширения и будет обеспечивать:
- Отправка ультразвукового сигнала под заданным углом;
- Прием отраженного ультразвукового сигнала и измерение расстояния до преграды.
Структурная схема (рисунок 1) даёт наиболее наглядное представление о последовательности взаимодействия функциональных частей поискового робота.
Рисунок 1 – Структурная схема блока измерения расстояния
В состав БИР входят следующие модули:
1. Микропроцессорный модуль (микроконтроллер серии MCS-51);
2. Блок согласования с шиной RPI. Предназначен для корректного функционирования системы ориентации с остальными модулями робота;
3. Ультразвуковой излучатель (УЗИ), предназначенный, для возбуждения УЗ колебаний в направлении предполагаемого препятствия;
4. Ультразвуковой приёмник (УЗП), осуществляющий, приём отраженных от препятствия колебаний;
5. Блок организации прерываний. Позволяет увеличить количество объектов способных прервать работу микропроцессора.
Микропроцессор является основным управляющим модулем системы ориентации (СО), Он функционирует согласно программе управления РП, заложенной в ПЗУ. Модули УЗИ и УЗП играют не последнюю роль в работе не только СО, но и всего робота в целом. От них зависит точность определения расстояния.
По команде управляющей программы микропроцессор активирует ультразвуковой излучатель (УЗИ) и запускает внутренний счетчик. Отраженный сигнал фиксируется ультразвуковым приемником и вызывает прерывание у микропроцессора. Счетчик останавливается, и по его значению вычисляется расстояние до преграды от которой произошло отражение ультразвука. Это значение передается в систему управления движением робота (БУД), которая производит корректировку направления и/или скорости движения, если это необходимо. При срабатывании того или иного датчика можно оценивать ситуацию сложившуюся вокруг робота.
Описание принципиальной электрической схемы. На принципиальной электрической схеме БИР (рисунок 2) основным элементом является микроконтроллер DD3, который выполняет программу, находящуюся в ПЗУ. В процессе выполнения программы микроконтроллер выдает на порт P2.7 высокий уровень сигнала (логическая единица), которая открывает ключ DD4.1. Это означает, что включён ультразвуковой излучатель и генератор начинает формировать колебания. При этом, в самом МК включается таймер, который будет измерять время от посылки сигнала до приема его отраженного значения. Он пропускает колебания сформированные генератором, который собран на элементах DD2.1, DD2.2, C5 и R3.Через динамик, эти колебания передаются во внешнюю среду в виде ультразвуковых волн.
ХЪ{}{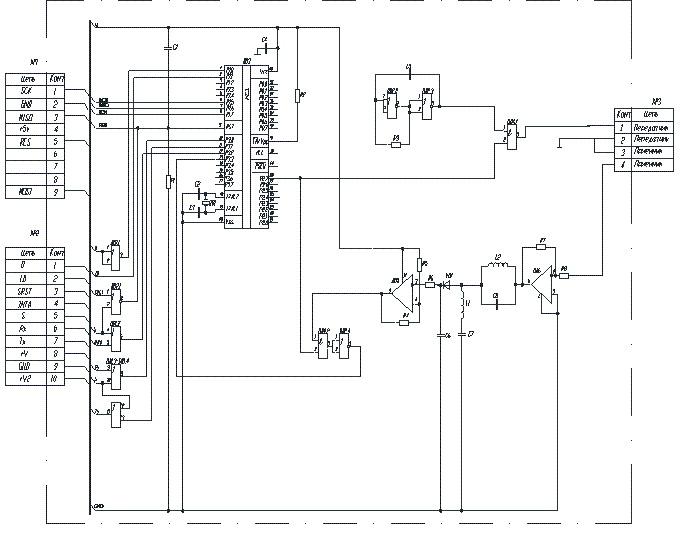
Рисунок 2- Схема электрическая принципиальная БИР
Микрофон, приняв колебания от отражённых объектов, передает их на операционный усилитель DD6. Проходя через полосовой фильтр, собранный на элементах L1, L2, C6 и C7, пропускается лишь та часть усиленного сигнала, которая совпадает с резонансной частотой ПФ. Фильтр настроен на пропускание колебаний частотой 42–45 кГц. Теперь на входе компаратора DD5 однополярный (сигнал прошёл через диод VD1 в прямом направлении), отфильтрованный на нужную частоту сигнал, который теперь сравнивается с минимальным порогом срабатывания ультразвукового приёмника. Этот порог задаётся подбором резистора R4.
Сигнал включения УЗП попадает с выхода P2.7 (логическая единица) попадает на вход DD4.2, который при отсутствии сравнения на компараторе DD6 (логический ноль) выдаёт «0», при инвертировании которого на вход INT1 (P3.3) микроконтроллера подается неактивный единичный сигнал. Однако, когда компаратор после сравнения подает на вход DD4.2 логическую единицу, на вход INT1 приходит «0» и т.о. формируется срез сигнала (переход из единичного состояния в нулевое). При срабатывании прерывания, в микроконтроллере вызывается процедура обработки этого прерывания, выключается таймер и, на основании его значения, вычисляется расстояние до препятствия.
В ходе работы был разработан блок измерения расстояний системы управления поисковым роботом. В проекте представлены структурная, функциональная и принципиальная схемы. Данная разработка позволит с большей точностью и скоростью обследовать помещения в поисках опасных предметов или пострадавших людей, что позволит уменьшить вероятность их гибели. Кроме того, возможны другие сферы применения системы мобильных роботов: картографирование, охрана помещений, выполнение вспомогательных работ в здании (уборка, перемещение грузов) и т.п.
Библиография
1. Основы робототехники : учеб. пособие / А.А. Иванов. — 2-е изд., испр. — М. : ИНФРА-М, 2017. — 223 с.
2. Вестник Донского государственного технического университета, 2013, №7/8 (75) / Вестник Донского государственного технического университета, №7/8 (75), 2013
3. Автоматические системы транспортных средств: Учебник / В.В. Беляков, Д.В. Зезюлин, В.С. Макаров, А.В. Тумасов.-М.: Форум: НИЦ ИНФРА-М, 2015.-352 с.
4. Проектирование автоматизированных систем производства: Учебное пособие / В.Л. Конюх.-М.: КУРС: НИЦ ИНФРА-М, 2014.-312 с.
References
1. Osnovy robototekhniki : ucheb. posobie / A.A. Ivanov. — 2-e izd., ispr. — M. : INFRA-M, 2017. — 223 s.
2. Vestnik Donskogo gosudarstvennogo tekhnicheskogo universiteta, 2013, №7/8 (75) / Vestnik Donskogo gosudarstvennogo tekhnicheskogo universiteta, №7/8 (75), 2013
3. Avtomaticheskie sistemy transportnykh sredstv: Uchebnik / V.V. Belyakov, D.V. Zezyulin, V.S. Makarov, A.V. Tumasov.-M.: Forum: NITs INFRA-M, 2015.-352 s.
4. Proektirovanie avtomatizirovannykh sistem proizvodstva: Uchebnoe posobie / V.L. Konyukh.-M.: KURS: NITs INFRA-M, 2014.-312 s.
|
 Рус
Рус