|
Программные системы и вычислительные методы
Правильная ссылка на статью:
Притыкин Ф.Н. Использование компьютерного моделирования движения руки антропоморфного робота для определения положения его основания относительно объектов манипулирования // Программные системы и вычислительные методы. 2025. № 1. С. 1-12. DOI: 10.7256/2454-0714.2025.1.70232 EDN: UUCVZP URL: https://nbpublish.com/library_read_article.php?id=70232
Использование компьютерного моделирования движения руки антропоморфного робота для определения положения его основания относительно объектов манипулирования
Притыкин Федор Николаевич
доктор технических наук
профессор, Омский государственный технический университет
644050, Россия, Омская область, г. Омск, проспект Мира, 11, ауд. Зв-516
Pritykin Fedor Nikolaevich
Doctor of Technical Science
Professor, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, ul. Prospekt Mira, 11, aud. Zv-516

|
pritykin@mail.ru
|
|
 |
Другие публикации этого автора
|
|
|
DOI: 10.7256/2454-0714.2025.1.70232
EDN: UUCVZP
Дата направления статьи в редакцию:
25-03-2024
Дата публикации:
03-04-2025
Аннотация:
Предметом исследования является использование интеллектуальной системы управления движением руки антропоморфного робота при выполнении операций размещения объектов манипулирования в контейнер заданных размеров. Объектом исследования является процесс определения параметров относительного положения основания руки по отношению к объектам манипулирования и контейнера, при которых возможно выполнение двигательных заданий. Автор подробно рассматривает алгоритм определения положения основания руки антропоморфного робота c использованием синтеза движений по вектору скоростей при решении задачи установки объектов манипулирования заданных, в виде прямоугольных призм в контейнер. Особое внимание в статье уделяется методике определения центра системы координат, связанного с основанием робота в неподвижном пространстве и вычисления целевых точек, в которые перемещается центр выходного звена при различных положениях ранее установленных в контейнер объектов манипулирования. Суть метода состоит в использовании компьютерного моделирования движения антропоморфного робота с использованием синтеза движений по вектору скоростей с оценкой взаимного положения механизма руки и запретных зон. В качестве запретных зон выступают установленные ранее объекты манипулирования располагающихся внутри контейнера и боковые стенки самого контейнера. Основными выводами представленного исследования является возможность использования разработанного алгоритма для проверки синтеза движений руки при заданных геометрических параметрах, задающих положение антропоморфного робота, конвейера и контейнера, при которых отсутствует возникновение тупиковых ситуаций. Новизна исследования состоит в разработке метода, основанного на итерационном поиске значений параметров взаимного положения основания руки, конвейера и контейнера на каждой итерации при возникновении тупиковых ситуаций. Представлены результаты расчетов положения основания руки робота и промежуточных конфигураций, построенных с использованием компьютерного моделирования движений на основе использования разработанного алгоритма. Проведенные исследования могут быть использованы при разработке информационно-управляющих комплексов подвижных объектов, в частности при разработке интеллектуальных систем управления автономно функционирующих антропоморфных роботов в организованных средах.
Ключевые слова:
интеллектуальные системы управления, механизмы манипуляторов, геометрическое моделирование, компьютерное моделирование, синтез движений, антропоморфные роботы, тупиковые ситуации, модель кинематической цепи, объекты манипулирования, выходное звено
Abstract: The subject of the study is the use of an intelligent hand movement control system of an anthropomorphic robot when performing operations of placing objects of manipulation in a container of specified dimensions. The object of the study is the process of determining the parameters of the relative position of the base of the hand in relation to the objects of manipulation and the container, in which it is possible to perform motor tasks. The author examines in detail the algorithm for determining the position of the base of the arm of an anthropomorphic robot using the synthesis of movements along the velocity vector when solving the problem of installing manipulating objects specified in the form of rectangular prisms into a container. Special attention is paid in the article to the methodology of determining the center of the coordinate system associated with the base of the robot in a fixed space and calculating the target points to which the center of the output link moves at various positions of previously installed manipulation objects in the container. The essence of the method is to use computer simulation of the movement of an anthropomorphic robot using the synthesis of movements along the velocity vector with an assessment of the relative position of the arm mechanism and restricted areas. Previously installed manipulation objects located inside the container and the side walls of the container itself act as restricted areas. The main conclusions of the presented study are the possibility of using the developed algorithm to test the synthesis of hand movements with given geometric parameters that set the position of an anthropomorphic robot, conveyor and container, in which there is no occurrence of deadlocks. The novelty of the research consists in the development of a method based on an iterative search for the values of the parameters of the mutual position of the base of the arm, conveyor and container at each iteration in case of deadlock situations. The results of calculations of the position of the base of the robot arm and intermediate configurations constructed using computer simulation of movements based on the use of the developed algorithm are presented. The conducted research can be used in the development of information and control complexes of mobile objects, in particular in the development of intelligent control systems for autonomously functioning anthropomorphic robots in organized environments.
Keywords: intelligent control systems, manipulator mechanisms, geometric modeling, computer modeling, movement synthesis, anthropomorphic robots, deadlocks, kinematic chain model, objects of manipulation, output link
1. Введение
Анализ современных исследований связанных с внедрением роботов в различных сферах деятельности человека в развитых странах мира показывает, что среднегодовые темпы роста производства роботов и их использования за период 2019 по 2024 годы составляет от 10 до 12 процентов. Одно из направлений где могут быть использованы роботы является разработка так называемых "умных складов". Как известно построение любого "умного склада" основано на использовании двух глобальных компанентов это информатизация и робототизация. Руководители в сфере логистики ожидают к 2024 году достижения уровня использования робототехники для управления входящими запасами до 24%, для упаковки исходящих грузов - 22% и для приема грузов до 20%. При автоматизации работ в складских помещениях могут быть использованы антропоморфные роботы оснащенные системами управления движением с использованием элементов искуственного интеллекта. Поэтому разработка интеллектуальных систем управления движением механизмами рук антропоморфных роботов способных заменить человека при выполнении указанных работ, где необходима оценка рабочей сцены и изменения в соответствии с этим поведения робота в организованной среде является актуальной [1-4]. Решение указанной проблемы связано с представлением знаний, накопленных роботом в процессе его функционирования [5-8]. Интеллектуальное управление предполагает использование виртуальных моделей на начальном этапе планирования поведения робота при определении достижимости тех или иных целевых точек в сложноорганизованной среде [9-12].
При компьютерном моделировании движений роботов применяют метод, основанный на использовании матриц частных передаточных отношений [13-15]. С помощью данных матриц устанавливается взаимосвязь скоростей выходного звена (ВЗ) и обобщенных скоростей. При использовании указанного метода часто необходимо определять взаимное положение антропоморфного робота, при котором его рука способна достигать заданные целевые точки с учетом изменяющейся с течением времени окружающей среды. Анализ источников показывает, что вопросы возникновения тупиковых ситуаций при компьютерном управлении движением антропоморфных роботов в организованных средах не достаточно исследованы. Поэтому существует необходимость в разработке алгоритма позволяющего заранее исключить возникновение тупиковых ситуаций при компьютерном управлении движением антропоморфного робота и обектов манипулирования [16,17].
2. Постановка задачи
Рассмотрим алгоритм определения положения основания антропоморфного робота с использованием компьютерного моделирования движений на примере разработки так называемого "умного склада", где необходимо размещать объекты манипулирования, имеющие форму прямоугольных параллелепипедов в контейнер заданных размеров. На рисунке 1 представлены объекты манипулирования 3 различных размеров, которые перемещаются в произвольном порядке по конвейеру 4. Данные объекты необходимо размещать в контейнере 5 с использованием руки антропоморфного робота 2. На рисунке 1 приведено условное изображение руки антропоморфного робота с обозначением осей и поворотов во вращательных кинематических парах, задающих значения обобщенных координат q2 - q8. Рука антропоморфного робота также может смещаться поступательно вдоль направляющей 1 за счет изменения обобщенной координаты q1. Кинематическая схема этого механизма изображена на рисунке 2. Изображение общего вида антропоморфного робота на рисунке 2 заимствовано с сайта НПО «Андроидная техника».
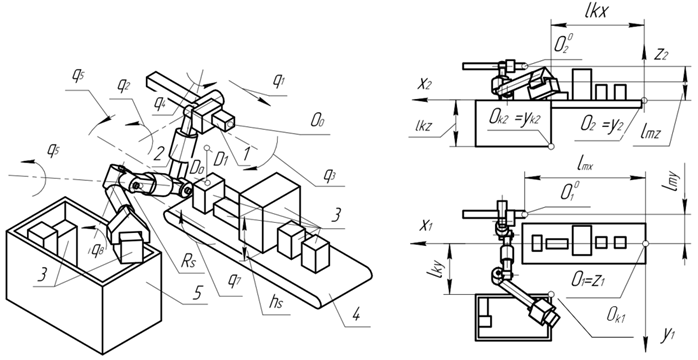
Рис. 1 Положение объектов манипулирования, контейнера, конвейера и руки антропоморфного робота
При автоматизированном управлении движением механизма руки антропоморфного робота в сложно организованном пространстве необходимо обеспечивать достижимость захватом заданных объектов манипулирования на конвейере и установку их в контейнер. Заметим, что боковые стенки контейнера и установленные в контейнере объекты манипулирования (прямоугольные призмы) выступают в качестве запретных зон при компьютерном управлении движением механизма руки (см. рис. 1). Положение запретных зон (объектов манипулирования) в решаемой задаче может изменяться с течением времени. На рисунке 1 положение основания руки робота определяется точкой О0(О01, О02). При большом числе степеней подвижности руки антропоморфного робота, а также при наличии запретных зон во внешней среде и ограничений на предельные значения обобщенных координат задача определения достижимости совокупности целевых точек при заданном положении основания (точки О0(О01, О02) ) аналитическими методами не может быть решена. Поэтому при решении указанной выше задачи необходимо использовать алгоритм, в основу которого положено последовательное компьютерное моделирование движений руки с оценкой возможности достижения заданных целевых точек при различном положении основания руки, контейнера и различном положении объектов манипулирования внутри контейнера. Ранее подобная задача, связанная с определение положения робота относительно запретных зон, решалась в работе [18].
Если возникнают тупиковые ситуации при автоматизированном синтезе движений по вектору скоростей, то необходимо изменять взаимное положение контейнера и основания руки антропоморфного робота по отношению к конвейеру. Тупиковая ситуация возникает тогда, когда алгоритм синтеза движений не способен вычислить следующую промежуточную конфигурацию при смещении центра ВЗ в следующую точку заданной траектории [14].
 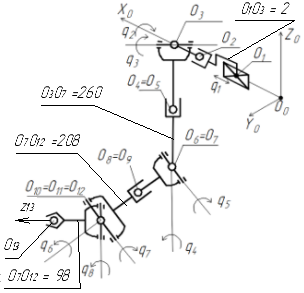
Рис. 2. Общий вид и кинематическая схема руки антропоморфного робота
nm = 13, n = 8 (М4-1-2-12-3-12-1-12-3-12-1-2-12)
После возникновения тупиковой ситуации компьютерное моделирование движения осуществляется вновь от начальных до совокупностей целевых точек, но при других значениях параметров lkx, lky , lkz, lmx, lmy и lmz характеризующих взаимное положение контейнера и основания механизма руки робота относительно конвейера (см. рис. 1).
3. Теория
Рассмотрим кинематическую схему антропоморфного робота, представленную на рисунке 2. В соответствии с методикой обозначения структурных моделей открытых кинематических цепей, принятой в работе [14] данный механизм, имеет обозначение М4-1-2-12-3-12-1-12-3-12-1-2-12. На указанном рисунке узловые точки задающие начала систем координат, связанных со звеньями механизма обозначены точками О1, О2, … , Оnm. Где параметр nm определяет число систем координат, используемых при задании модели кинематической цепи [14]. Расстояния между узловыми точками на рисунке заданы длинами О1О3 = 2, О3О7 = 260, и т.п. в миллиметрах. Заметим, что некоторые узловые точки могут совпадать между собой. Известно, что совокупность мгновенных состояний, удовлетворяющих заданной точности позиционирования d центра ВЗ, определяет область ΩQ принадлежащая ГQ в многомерном пространстве обобщенных скоростей Q. Где, ГQ обозначена р-плоскость заданная линейной системой уравнений задающей зависимость скоростей простейших движений ВЗ от обобщенных скоростей q̇i (верхний индекс обозначений Q означает задание и исследование геометрических объектов ΩQ и ГQ в многомерном пространстве Q [19-20].
Решение задачи определения значений параметров lkx, lky , lkz, lmx, lmy и lmz при которых обеспечена установка объектов манипулирования в контейнер состоит из следующих этапов:
1. Выбирают конечную совокупность точек-претендентов О0 и точек Ok соответственно задающих положения центров систем координат, связанных с основанием руки робота и базовой точки контейнера. Принимаются максимальные и минимальные значения параметров l maxkx, l maxky , l maxkz, l maxmx, l maxmy, l maxmz, l minkx, l minky , l minkz, l minmx, l minmy и l minmz .
2. Задаются положения и форма геометрических объектов, характеризующих окружающую внешнюю среду. Для рассматриваемого примера необходимо задать совокупность многогранников задающих грани боковых стенок контейнера, положение которого определяется параметрами lkx, lky и lkz в неподвижной системе координат Oxyz. Также необходимо задать в подвижных системах координат, неподвижно связанных с объектами манипулирования (четырехугольными прямоугольными призмами) положение граней, определяющих их размеры и форму.
3. Выбирается совокупность начальных точек на конвейере, и конечных положений целевых точек внутри контейнера (эти точки задают конечные положения центра ВЗ руки антропоморфного робота). Заметим, что объекты манипулирования могут перемещаться конвейером в различном порядке. Положения двух объектов манипулирования 31 на одном из этапов компьютерного моделирования изображены на горизонтальной проекции рисунка 3.
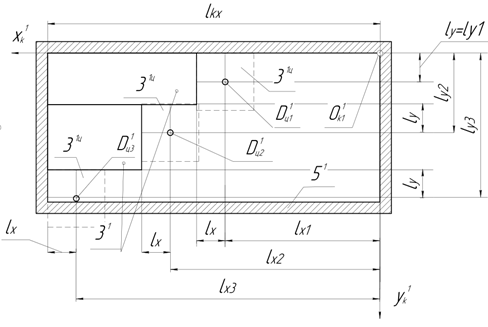
Рис. 3. Вычисление положения целевых точек Dцi на горизонтальной проекции при различном положении объектов манипулирования в контейнере
4. Задаются промежуточные целевые точки (D1, … т.п.) определяющие траектории движения центра ВЗ состоящие из отрезков прямых.
5. Организуется цикл построения и анализа положений промежуточных конфигураций и объектов манипулирования относительно запретных зон. При этом используется компьютерное моделирование движения центра ВЗ и объектов манипулирования до конечных целевых точек по критерию минимизации объема движения, если пересечения механизма манипулятора и перемещаемого объекта манипулирования с запретными зонами отсутствует. Если возникают указанные пересечения с запретными зонами исследуются другие допустимые мгновенные состояния, определяемые вектором приращений обобщенных координат [14]. Если при компьютерном моделировании возникают тупиковые ситуации набор параметров lkx, lky, lkz, lmx, lmy и lmz необходимо изменять. Заметим, что параметры lmx и lkx необходимо исследовать с учетом максимального значения обобщенной координаты q1.
На рисунке 3 представлена горизонтальная проекция контейнера, в котором необходимо определять положения объектов манипулирования. На рисунке изображены два ранее установленные объекты манипулирования 31. Определение положений целевых точек Dц1, Dц2 и Dц3 необходимо осуществлять с учетом параметров lx и ly задающих размеры перемещаемого объекта манипулирования. После вычисления положения указанных точек определяется пересечения объекта 31ц с гранями контейнера. Как видно из рисунка данному условию не удовлетворяет точка Dц3. Из точек Dц1 и Dц2 выбирается точка, которая имеет какое либо наименьшее значение lyi или наибольшее lxi . Если разность координат lx1 - lx2 > lx то выбирается точка у которой будет большее значение lyi. Где параметры lxi (lx1, lx2, lx3) и lyi (ly1, ly2, ly3) определяют положения целевых точек-претендентов перемещаемого объекта манипулирования на горизонтальной проекции. На рисунке 1 точка D0 задает точку, в которую смещается центр ВЗ при захвате объекта манипулирования. После захвата объекта манипулирования центр ВЗ из точки D0 перемещается в точку D1 и после этого к целевым точкам Dц1 и т.п.
Алгоритм определения положения контейнера и основания руки антропоморфного робота относительно конвейера представлен на рисунке 4.
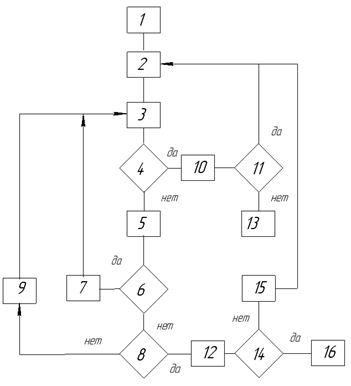
Рис. 4 — Алгоритм вычисления вычисления основания механизма руки антропоморфного робота
На рисунке 4 приняты следующие обозначения: 1 – задание начальных значений параметров lkx, lky, lkz и lmx, lmy и lmz, приращений Dlkx, Dlky, Dlkz и Dlmx, Dlmy и Dlmz и предельных значений l maxkx, l maxky, l maxkz, l maxmx, l maxmy, l maxmz, l minkx, l minky, l minkz, l minmx, l minmy и l minmz . Задание информации о начальном положении механизма руки и модели кинематической цепи (q1¸ qn, nm, nkod, li , r, n, где nkod – коды преобразований систем координат [14]), li - длины веньев механизма, r - размерность вектора простейших движений ВЗ, n - число обобщенных координат), задание предельных значений обобщенных координат, задание максимальных значений параметров kimax , kimax определяющих максимальные значения задающие размеры области ΩQ; 2 - вычисление последовательности целевых точек-претендентов конечных положений центра ВЗ (D1, Dц1, Dц2 см. рис. 1, рис. 3); 3 – вычисление вектора обобщенных скоростей Q обеспечивающего направление движения центра ВЗ к целевым точкам (D1, Dц1, Dц2 и т.п.); 4 – все значения вектора Q использованы ki > kimax (возникает тупиковая ситуация ?); 5 – реализация значений вектора Q и вычисление следующей конфигурации (q1 = q1 + Dq1, … , qn = qn + Dqn , при этом принято допущение раменства значений обобщенных скоростей и приращений q̇1 = Dq1, q̇2 = Dq2 …, q̇n = Dqn); 6 – расчетная конфигурация пересекает запретные зоны, или не удовлетворяет предельным значениям обобщенных координат; 7 – изменение значений параметров ki (ki= ki +1) задающих координаты точек внутри области ΩQ; 8 – целевая точка Dц достигнута; 9 – ki = 0, вычисление матрицы частных передаточных отношений и вектора простейших движений ВЗ; 10 – изменение значений параметров lkx, lky, lkz и lmx, lmy и lmz (lkx + Dlkx и т.п.), 11 – значения параметров удовлетворяют заданным предельным значениям l minkx< lkx< l maxkx, l maxky< lky<l minky, l maxkz < lkz < l minkz, l maxmx < lmx < l minmx, l maxmy < lky< l minmy, l maxmz < lmz< l minmz; 12 – заданная целевая точка может быть достигнута, переход с текущими значениями параметров lkx, lky, lkz и lmx, lmy и lmz к синтезу движений к другим целевым точкам; 13 – при заданных размерах контейнера и объектов манипулирования целевые точки не могут быть достигнуты; 14 – все целевые точки достигнуты; 15 – изменение последовательности размещения объектов манипулирования и переход к синтезу движений к другим целевым точкам; 16 – значения параметров lkx, lky, lkz и lmx, lmy и lmz позволяют установку объектов манипулирования в контейнер.
4. Результаты экспериментов
На рисунке 5 на фронтальной и профильной плоскостях проекций представлен фрагмент синтеза движений руки антропоморфного робота кинематическая схема которого представлена на рисунке 2. На рисунке изображения проекций объектов манипулирования обозначены 32 и 33. Соответственно изображения проекций точек О1, Dц и контейнера 5 обозначены О21, О31, D2ц, D3ц, 52, и 53. При решении тестовой задачи были приняты следующие размеры геометрических объектов – размеры контейнера (соответственно длина, ширина и высота в миллиметрах) 500х325х200, размеры объектов манипулирования 210х110х85 - 3 шт. и 110х50х50 - 3 шт. Компьютерное моделирование указало на то, что при значениях параметров lkx = 0, lky = -140, lkz = -200, lmx = -50, lmy = -380 и lmz =330 рука антропоморфного робота может обеспечить установку заданных объектов манипулирования внутри контейнера.

Рис. 5 - Результат фрагмента компьютерного моделирования движения руки антропоморфного робота на фронтальной и профильной плоскостях проекций при установке объекта манипулирования в контейнер
Выводы и заключение
Как правило различные изделия поставлятся в различных упаковках, котрые могут иметь форму прямоугольных паралелепипедов различных размеров. Хранение, поиск, ситематизация и транспортировка указанных изделий в складских помещениях требует больших временных затрат обслуживающего персонала. Использование "умных складов", где выполняются процессы погрузки и разгрузки на стелажи и со стеложей и в транспортные контейнеры антропоморфными робатами при транспортировки этих изделий к местам их хранения может в некоторой степени автоматизировать процесс обработки грузов. В конечном итоге это позволяет обеспечить увеличение производительности и сокращения времени транспортировки изделий в складских помещениях. Результаты компьютерного моделирования движения антропоморфного робота с использованием разработанного алгоритма показали возможность предвидеть и преодолевать тупиковые ситуации при компьютерном управлении движением с помощью изменения параметров взаимного расположения руки антропоморфного робота относительно объектов окружающей среды. Проведенные исследования могут быть использованы при разработке информационно-управляющих комплексов подвижных объектов, в частности при разработке систем управления автономно функционирующих антропоморфных роботов в складских помещениях.
Библиография
1. Щербатов И. А. Интеллектуальное управление робототехническими системами в условиях неопределённости // Вестник АГТУ, сер. Управление, вычислительная техника и информатика. 2010. № 1. С. 73-77.
2. Ющенко А. С. Интеллектуальное планирование в деятельности роботов // Мехатроника, автоматизация, управление. 2005. № 3. С. 5-18.
3. Афонин В.Л., Базров Б.М., Слепцов В.В. Тензорное исчисление в задачах управления и представления знаний в интеллектуальных обрабатывающих технологических системах // Проблемы машиностроения и автоматизации. 2021. № 1. С. 9-18.
4. Мелехин В.Б., Хачумов М.В. Планирование целенаправленной деятельности автономным интеллектуальным роботом с обновлением знаний в кратковременной памяти // Мехатроника, автоматизация, управление. 2024. Т. 25. № 2. С. 79-92.
5. Мелехин В.Б., Хачумов М.В. Когнитивные инструменты абстрактного мышления автономных интеллектуальных мобильных систем // Мехатроника, автоматизация, управление. 2023. Т. 24, № 6. С. 317-326.
6. Манько С.В., Лохин В.М., Крайнов Н.В., Малько А.Н. Алгоритмы интеллектуального управления реконфигурируемыми роботами в компоновке колеса и многоагентными системами на их основе // Мехатроника, автоматизация, управление. 2022. Т. 23, № 8. С. 420-429.
7. Дубенко Ю. В., Дышкант Е. Е., Тимченко Н. Н., Рудешко Н. А. Гибридный алгоритм формирования кратчайшей траектории, основанный на применении многоагентного обучения с подкреплением и обмена опытом // Вестник компьютерных и информационных технологий. 2021. № 11. С. 13-26.
8. Kutlubaev, I.M. Bogdanov, A.A., Novoseltsev, N.V., Krasnobaev, M.V., Saprykin, O.A. (2016) Control system of the anthropomorphous robot for work on the low-altitude earth orbit. International Journal of Pharmacy and Technology, 3, 18913-18199.
9. Hasegawa, T., Suehiro, T., Takase, K. (1992) A model-based manipulation system with skill-based xecution. IEEE Trans. Rob. and Autom., vol. 8, 535-544.
10. Pratt, J. , Dilworth P., Pratt, G. (1997) Virtual model control of a bipedal walking robot. Proceedings of Int. Conf. on Robotics and Automation, vol. 1, 193-198.
11. Hrr, J. Pratt, J.Chew, C.Herr, H.Pratt, G. (1998) Adaptive virtual model control of a bipedal walking robot. IEEE Inter. Simps. Intellegence and Systems, 245-251.
12. Tsukamoto, H., Takubo, T. ,Ohara, K., Mae, Y., Arai, T. (2010) Virtual impedance model for obstacle avoidance in a limb mechanism robot. (ICIA): IEEE Inf. and Autom., 729-734.
13. Корендясев А. И., Саламандра Б. Л., Тывес Л. И. Манипуляционные системы роботов. М: Машиностроение, 1989.
14. Притыкин Ф. Н. Виртуальное моделирование движений роботов, имеющих различную структуру кинематических цепей. Омск: Изд-во ОмГТУ, 2014.
15. Whitney, D. E. (2010) The Mathematics of Coordinated Control of Prosthetic Arms and Manipulators. Journal of Dynamic Systems, Measurement, and Control, 94 (4), 303-309.
16. Pritykin, F. N., Nebritov, V. I. (2021) Using weight values of generalized velocities to handle deadlocks in the synthesis of anthropomorphic robot arm movement. Journal of Physics: Conference Series, 1791(1), 012059.
17. Pritykin, F. N., Nebritov, V. I. (2019) Determination of target points approachability by an android robot arm in organized space based on virtual modeling of movements . Journal of Physics: Conference Series, 1260, 072015.
18. Притыкин Ф. Н., Небритов В. И. Графическая оптимизационная модель процесса сварки изделий роботом на чертеже Радищева // Программные системы и вычислительные методы. 2021. № 2. С. 63-73.
19. Притыкин Ф. Н. Моделирование гиперповерхностей, отражающих взаимосвязь кинематических параметров механизма андроидного робота // Вестник компьютерных и информационных технологий. 2022. Т. 19, № 7. C. 21-29.
20. Притыкин Ф. Н. Исследование кинематических параметров андроидного робота при автоматизированном синтезе движений по вектору скоростей // Омский научный вестник. 2022. № 2 (182). С. 5-9.
References
1. Shcherbatov, I. A. (2010). Inteligentné riadenie robotických systémov v neistote. Bulletin AGTU, pane. Manažment, výpočtová technika a informatika, 1, 73-77.
2. Yushchenko, A. S. (2005). Inteligentné plánovanie v činnostiach robotov. Mechatronika, automatizácia, riadenie, 3, 5-18.
3. Afonin, V. L., Bazrov, B. M., & Klitsov, V. V. (2021). Tensor calculus v problémoch riadenia a reprezentácie poznatkov v inteligentných technologických systémoch spracovania. Problémy strojárstva a automatizácie, 1, 9-18.
4. Melehin, V. B., & Hachumov, M. V. (2024). Plánovanie účelovej činnosti autonómnym inteligentným robotom s aktualizáciou poznatkov v krátkodobej pamäti. Mechatronics, automatizácia, manažment, 2(25), 79-92.
5. Melehin, V. B., & Hachumov, M. V. (2023). Kognitívne nástroje abstraktného myslenia autonómnych inteligentných mobilných systémov. Mechatroniky, automatizácia, riadenie, 6(24), 317-326.
6. Manko, S. V., Lokhin, V. M., Kranov, N.V., & Malko A. N. (2022). Algoritmy pre inteligentné riadenie rekonfigurovateľných robotov v usporiadaní kolies a multi-agent systémov založených na nich. Mechatronika, automatizácia, riadenie, 8(23), 420-429.
7. Dubenko, Y. V., Dyschkant, E. E., Timchenko, N. N., & Rudhko, N. A. (2021). Hybridný algoritmus formovania najkratšej trajektórie založený na aplikácii multi-agentového tréningu s posilnením a výmenou skúseností. Bulletin počítačových a informačných technológií, 11, 13-26.
8. Kutlubaev, I.M. Bogdanov, A.A., Novoseltsev, N.V., Krasnobaev, M.V., & Saprykin, O.A. (2016). Control system of the anthropomorphous robot for work on the low-altitude earth orbit. International Journal of Pharmacy and Technology, 3(8), 18913-18199.
9. Hasegawa, T., Suehiro, T., & Takase, K. (1992). A model-based manipulation system with skill-based execution. IEEE Trans. Rob. and Autom, 8, 535-544.
10. Pratt, J. , Dilworth P., & Pratt, G. (1997). Virtual model control of a bipedal walking robot. Proceedings of Int. Conf. on Robotics and Automation, 1, 193-198.
11. Hrr, J. Pratt, J.Chew, C.Herr, & H.Pratt, G. (1998). Adaptive virtual model control of a bipedal walking robot. IEEE Inter. Simps. Intellegence and Systems, 245-251.
12. Tsukamoto, H., Takubo, T. ,Ohara, K., Mae, Y., & Arai, T. (2010). Virtual impedance model for obstacle avoidance in a limb mechanism robot. (ICIA): IEEE Inf. and Autom, 729-734.
13. Korendyashev, A. I., Salamandra, B. L., & Tyvez, L. I. (1987). Manipulačné systémy robotov. Moscow: Strojárstvo.
14. Pritykin, F. N. (2014). Virtuálna simulácia pohybov robotov s rôznou štruktúrou kinematických reťazí. Omsk: Izd-v OmGTU.
15. Whitney, D. E. (2010). The Mathematics of Coordinated Control of Prosthetic Arms and Manipulators. Journal of Dynamic Systems, Measurement, and Control, 4(94), 303-309.
16. Pritykin, F. N., & Nebritov, V. I. (2021). Using weight values of generalized velocities to handle deadlocks in the synthesis of anthropomorphic robot arm movement. Journal of Physics: Conference Series, 1791, 012059.
17. Pritykin, F. N., & Nebritov, V. I. (2019). Determination of target points approachability by an android robot arm in organized space based on virtual modeling of movements. Journal of Physics: Conference Series, 1260, 072015.
18. Pritykin, F. N., & Nebritov, V. I. (2021). Grafický optimalizačný model výrobkov procesu zvárania robotov na výkrese Radishchev. Softvérové systémy a výpočtové metódy, 2, 63-73.
19. Pritykin, F. N. (2022). Simulácia hypersexuí odrážajúca interakciu kinematických parametrov mechanizmu android robota. Bulletin počítačových a informačných technológií, 7(19), 21-29.
20. Pritykin, F. N. (2022). Stúdium kinematických parametrov robota android v automatizovanej syntéze pohybov na vektore rýchlosti. Omsk vedecký bulletin, 2(182), 5-9.
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Предмет исследования. Статья, исходя из названия, должна быть посвящена использованию компьютерного моделирования движения руки антропоморфного робота для определения положения его основания относительно объектов манипулирования. Содержание статьи соответствует заявленной теме.
Методология исследования базируется на анализе и синтезе данных, индукции и дедукции. Автор на высоком уровне использует графический инструментарий, что формирует крайне положительное впечатление от ознакомления с рецензируемой статьей. При доработке статьи и включении анализа данных о практики использования подобных роботов рекомендуется также построить график роста распространённости их применения в различных видах экономической деятельности. Это значительно расширит востребованность научной статьи у потенциальной читательской аудитории.
Актуальность исследования вопросов использования компьютерного моделирования движения руки антропоморфного робота для определения положения его основания относительно объектов манипулирования не вызывает сомнения, т.к. это напрямую отвечает поставленным Президентом России национальным целям развития, а также задачам по повышению технологического суверенитета.
Научная новизна в рецензируемой статье присутствует. В частности, она связана с представленным на рисунке 4 алгоритмом вычисления основания механизма руки антропоморфного робота. Представляется, что этот алгоритм будет интересен широкому кругу потенциальной читательской аудитории.
Стиль, структура, содержание. Стиль изложения научный. Структура статьи чётко обозначена, позволяет раскрыть содержание заявленных вопросов. Рекомендуется также добавить обсуждение полученных результатов исследования и расширить раздел «заключение», указав конкретные направления использования полученных результатов и дальнейшие векторы исследования. Так, автор утверждает, что полученные результаты «могут быть использованы при разработке информационно-управляющих комплексов подвижных объектов»: а кем конкретно? Какие эффекты от использования будут получены? В чём выгоды? Какие могут возникнуть потенциальные сложности и как на них реагировать? Ответы на эти вопросы значительно усилят данную научную статью и обеспечат её высокий уровень востребованности у широкого круга лиц, в т.ч. и за рубежом.
Библиография представлена 20 источниками. Ценно, что автор изучил и последние научные публикации. Также положительно характеризует статью по выбранной теме исследования наличие зарубежных источников. Было бы интересно также дополнить анализом числовых данных практики использования подобных роботов в настоящее время и, соответственно, указать их источники.
Апелляция к оппонентам. Несмотря на сделанный краткий обзор источников во введении, какой – либо научной дискуссии не обнаружено. Было бы интересно изучить и сравнить взгляды разных учёных на поднимаемые вопросы, а также показать прирост научного знания по сравнению с тем, что уже содержится в научных публикациях.
Выводы, интерес читательской аудитории. С учётом всего вышеизложенного заключаем о высоком уровне написанной научной статьи. Устранение указанных в тексте рецензии замечаний позволит кратно повысить её востребованность у потенциальной читательской аудитории: и в научном сообществе, и в органах государственной власти, и в промышленности, и среди аналитиков.
Результаты процедуры повторного рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Предмет исследования являются, по мнению автора, обследование и анализ возможности и последствий использования компьютерного моделирования движения руки антропоморфного робота для определения положения его основания относительно объектов манипулирования.
Методология исследования исходя из анализа статьи можно сделать вывод о использовании в качестве методологической основы компьютерной диагностики моделировании движений роботов метод, основанный на использовании матриц частных передаточных отношений. Автором также использовался метод литературного анализа, сравнительных характеристик объектов и процессов алгоритмического и математического моделирования, метод построения положения целевых точек на горизонтальной проекции при различном положении объектов манипулирования в контейнере.
Актуальность затронутой темы связано с тем, что до настоящего времени исследований связанных с внедрением роботов в различных сферах деятельности человека в развитых странах мира недостаточно. Одно из направлений использования роботов является разработка так называемых «умных складов», основанных на использовании двух процессов - информатизации и роботизации. В сфере логистики ожидают к 2024 году достижения уровня использования робототехники для приема грузов, управления входящими запасами, упаковки исходящих грузов до 24%. При автоматизации работ в складских помещениях могут быть использованы антропоморфные роботы оснащенные системами управления движением с использованием элементов искусственного интеллекта, поэтому разработка интеллектуальных систем управления движением механизмами рук антропоморфных роботов способных заменить человека поведения робота в организованной среде является актуальной. Автор восполнил этот пробел.
Научная новизна заключается в попытке автора статьи на основе проведенных исследований компьютерного моделирования движения антропоморфного робота с использованием разработанного алгоритма показали возможность предвидеть и преодолевать тупиковые ситуации при компьютерном управлении движением с помощью изменения параметров взаимного расположения руки антропоморфного робота относительно объектов окружающей среды. Результаты могут быть использованы при разработке информационно-управляющих комплексов подвижных объектов, в частности при разработке систем управления автономно функционирующих антропоморфных роботов в складских помещениях.
Стиль, структура, содержание стиль изложения результатов достаточно научный. Статья снабжена богатым иллюстративным материалом, отражающим процесс создания алгоритма компьютерного моделирования движения руки антропоморфного робота на фронтальной и профильной плоскостях проекций при установке объекта манипулирования в контейнер. Рисунки, фотографии и схемы иллюстративны, уместны.
Однако следует отметить ряд стилистических неточностей, повторов и грамматических ошибок, что впрочем не снижает научности представленных в статье результатов. (Например, Рис. 4 — Алгоритм вычисления вычисления основания механизма руки антропоморфного робота; использовании двух глобальных компанентов, это информатизация и робототизация; элементов искуственного интеллекта).
Библиография весьма исчерпывающая для постановки рассматриваемого вопроса.
Апелляция к оппонентам представлена в выявлении проблемы на уровне имеющейся информации, полученной автором в результате анализа.
Выводы, интерес читательской аудитории в выводах есть обобщения, позволяющие применить полученные результаты. Целевая группа потребителей информации в статье не указана.
|
 Рус
Рус









