|
Software systems and computational methods
Правильная ссылка на статью:
Akhmedova S.M.
Research of a flexible production system by methods of imitating modeling at a stage of sistemotechnichal design
// Программные системы и вычислительные методы.
2019. № 4.
С. 77-86.
DOI: 10.7256/2454-0714.2019.4.31350 URL: https://nbpublish.com/library_read_article.php?id=31350
Research of a flexible production system by methods of imitating modeling at a stage of sistemotechnichal design /
Исследование гибкой производственной системы методами имитационного моделирования на этапе системотехнического проектирования
Ахмедова Светлана Магеррам
старший преподаватель, кафедра Информационные технологии и программирование, Сумгаитский Государственный Университет
AZ5008, Азербайджан, г. Сумгаит, 43 квартал, 1, Сумгаитский Государственный Университет
Akhmedova Svetlana Magerram
Senior Lecturer, Department of Information Technology and Programming, Sumgait State University
AZ5008, Azerbaidzhan, g. Sumgait, 43 kvartal, 1, Sumgaitskii Gosudarstvennyi Universitet

|
axmedova60@mail.ru
|
|
 |
|
DOI: 10.7256/2454-0714.2019.4.31350
Дата направления статьи в редакцию:
13-11-2019
Дата публикации:
06-01-2020
Аннотация:
Предметом исследования является оценка целесообразности проектирования нового объекта на начальном этапе компьютерными экспериментами с использованием методов имитационного моделирования, и в представлении результатов имитации на экране монитора анимационными методами в двух или трехмерных пространствах. В статье, рассматриваются задачи создания имитационной модели проектируемого объекта и его исследования компьютерными экспериментами, для решения поставленной задачи используется программный комплекс RAO- studio, предназначенный для разработки и отладки имитационных моделей на языке РДО. С учетом требований RAO- studio объектом исследования является конкретный объект ГПС резка рулонных металлических листов на листы и листы на карточки, очистка их поверхности. RAO – studio позволяет воспроизводить на компьютере динамику объекта, принятие решений сложной системой управления, решение задачи системного анализа и синтеза объектов различного назначения с использованием имитационных моделей. С учетом требований RAO- studio в работе на примере конкретного объекта ГПС резка рулонных металлических листов на листы и листы на карточки, очистка их поверхности последовательно рассматриваются следующие вопросы: разработка концептуальной модели участка, принятого в качестве объекта исследования; разработка структурно-кинематической схемы ГПС; разработка архитектуры инструмента автоматизированного моделирования (ИАМ) имитационной модели ГПС на языке РДО с использованием закладок RAO-studio; разработка алгоритма имитационного моделирования ГПС; разработка алгоритма управления ГПС в виде временной сети Петри с использованием закладок RAO-studio ; разработка алгоритма управления ГПС в действующем производстве с использованием результатов имитационной модели и алгоритма управления в виде временной сети Петри.
Ключевые слова:
имитационная модель, гибкий производственный модуль, промышленный робот, продукционная система, база знаний, моделирование, алгоритм, концептуальная модель, база данных, анимация
Abstract: Object evaluation - assessment of the feasibility of designing a new object at the initial stage - computer experiments using simulation methods and presenting simulation results on a monitor using animation methods in two or three-dimensional spaces. In the article devoted to the tasks of creating simulation models, various RAO-studio software systems are used, which are designed for the development and development of simulation models in the language of RDO. Taking into account the requirements, RAO-Studio is studying a specific GPS object; cutting rolled metal sheets on sheets and sheets on cards, cleaning their surface. RAO-studio allows you to play a dynamic object on a computer, make decisions using a control system, and solve the problems of system analysis and synthesis of objects. Taking into account the requirements of RAO-studio for working with the GPS object as an example, cutting rolled metal sheets on sheets and sheets on frames, cleaning their surface leads to the following issues: development of a conceptual model of the site adopted as the object of study; development of structural-kinematic diagrams of GPS; development of the architecture of a computer-aided modeling tool of a GPS simulation model in the RDO language using RAO-studio bookmarks; development of a simulation algorithm for GPS; development of GPS control algorithm on the Internet. development of a GPS control algorithm in existing production using the results of a simulation model and a control algorithm in a video broadcast of a Petri net.
Keywords: simulation model, flexible production module, industrial robot, production system, knowledge base, modeling, algorithm, conceptual model, data Base, animation
Introduction. The classical structure of design of objects consists of the following main stages: planning; research works; design; production, test and operation. In many respects life cycle of a designed project at the same time depends on terms of performance of the stages preceding an operational phase. Therefore, effective use of methods of automation before operation, in a consequence, has to reduce the term of realization of preliminary design stages that will raise life cycle of a designed project in operation.
Experience of design of difficult objects in the form of the flexible production systems (FPS) showed, that even more is aggravated at its implementation in real productions as FPS consists of a set dynamic mechatronic devices which function in interaction for achievement of an ultimate goal in real time. Therefore, the ideas of designers at the initial stage of design in most cases are not repaid at a final stage, while testing of naturally implemented physical models. Consequently, redesign in the iterative mode is required by consecutive elimination of the made essential mistakes. This will increase terms of design and implementation of design solutions and in certain cases can lead to moral obsolescence of a designed project before input it in operation. For a solution of this problem the perspective direction is assessment of expediency of design of a new object at the initial stage computer experiments with use of methods of simulation modeling, and in representation of results of simulation on the monitor screen by animation methods in two or three-dimensional spaces.
In article, problems of creation of a simulation model of a designed project and its research are considered by computer experiments, for a solution of an objective the program RAO-studio complex intended for development and debugging of simulation models in the RDO [1] language is used. RAO – studio allows to reproduce on the computer dynamics of an object, decision-making by a complex system of management, a solution of a problem of systems analysis and synthesis of objects of different function with use of simulation models. In essence, the object description language, control algorithms and tasks in RAO-studio are carried out with use of knowledge representation languages. Thus after each event the system of an output which browses production rules in the knowledge base (KB) is caused and in case of execution of a condition of application of the selected rule the beginning of the corresponding action is excited. Thus the production system, the block of simulation of irregular events and the device of conducting events, in total carry out creation of production model and the analysis of results of simulation calculates required indicators of functioning of a system. The system of animation displays results of simulation in the form of behavior of a modeled object on the monitor screen.
Taking into account requirements of RAO-studio in work on the example of a concrete object of FPS cutting of rolled metal sheets on sheets and sheets on cards, cleaning of their surface the following questions are consistently considered: development of conceptual model of the site accepted as a research object; development of the structural and kinematic scheme FPS; development of architecture of the instrument of the automated modeling (IAM) of simulation model FPS in the RDO language with use of the bookmarks RAO-studio; development of an algorithm of imitating modeling of FPS; development of a control algorithm of FPS in the form of Petra Net with use of the bookmarks RAO-studio; development of a control algorithm of FPS in the operating production with use of results of a simulation model and control algorithm in the form of Petri Net
Conceptual model. The site has to function as follows: cutting of a rolled leaf on sheets of the required size type, depending on requirements of production, is carried out by the first guillotine scissors (GN1); the leaf the conveyor moves to a position of the second GN2 and the worker the leaf turns on 900 and moves to the work area of GN2 where cutting of sheets on cards is carried out; cards on one piece are established by the second worker to the work area of the device of mechanical cleaning, and operation cleaning of a surface of cards is carried out; further the processed cleaned cards are loaded by the third worker on the conveyor and move for further processing to the following site. The same way process continues in the cyclic mode in the established time interval.
Taking into account requirements of conceptual model the structural and kinematic scheme FPS is developed [2, 3].
The structural and kinematic scheme FPS (pic. 1) turns on the following mechatronic devices, the main and service equipment: industrial robots (PR1¸3); transport systems (TC1¸4); the lifting positioning manipulators (PPM 1,2); guillotine scissors (GN1,2); the positioning manipulators (PM 1¸3); device of mechanical cleaning (DMC).
FPS functions as follows: rolled metal sheets of the standard sizes (depending on requirements of production) on TC1 are transported to the work area to the first guillotine PP1 scissors GN1 rises and joins; the received leaf moves to position PM1 and after preparation PR1 grabs; PR1 turns on 1800 and moves a leaf to position TC2; TC2 transports a leaf to position PPM2; simultaneous inclusion of PPM2 and GN2 carries out cutting sheet on cards; a card move to a position of PM2 and PR2 moves it to UMO position; after cleaning of a surface of a card it is transported to a table of PM3 and PR3 moves it to position TC4 and the last transports a card to the following site. To similarly above FPS functions in the serial-parallel mode in the set time interval.
Architecture of the instrument of the automated modeling (IAM) of a simulation model of FPS. In the picture 2 developed architecture of IAM of a simulation model of FPS in the RDO language with use of the RAO-studio tabs is shown.
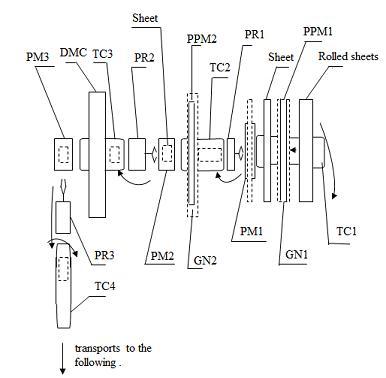
Picture 1. Structural – cinematic scheme ГПМ
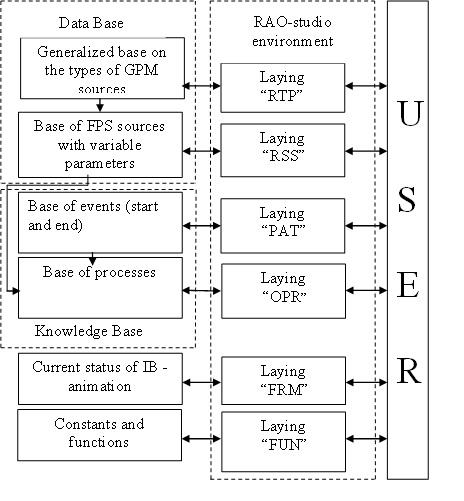
Picture2. Architecture of the instrument of the automated modeling (IAM) of a simulation model of FPS.
The control algorithm on the basis of production rules is developed for functioning of FPS.
Apparently from architecture the user in the automated mode in the environment of RAO-studio creates the database (D) and the knowledge base (KB) of a simulation model of FPS [3]. The DB is created by the RTP and RSS tabs, and KB "PAT" and "OPR" RAO-studio.
The developed IAM of a simulation model the bookmark "FRM" together with other laying of the program RAO-studio complex for reproduction of results of a simulation model provides a research and assessment of expediency of creation of FPS of new appointment at the initial stage of systematical design with computer experiments.
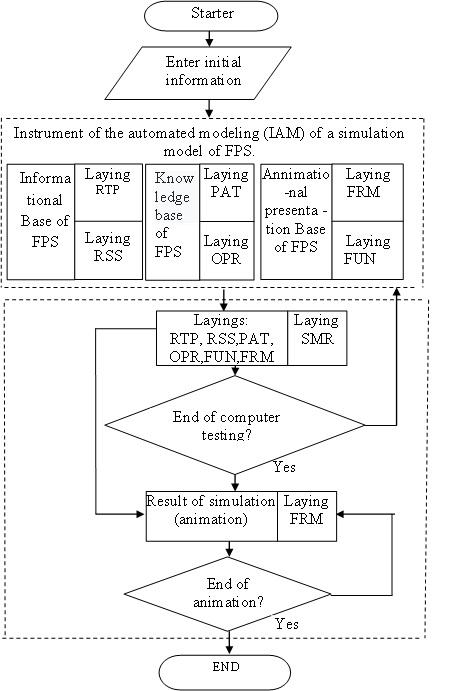
Algorithm of imitating modeling of FPS. In the picture 3 the offered generalized algorithm of simulation model FPM [4] is shown.
The research of simulation model FPS is carried out by computer experiments at two stages:
At the first stage the instrument of the automated modeling functioning in the environment of RAO-studio creates databases (the generalized base on types of the FPS resources with use of the RTP tab and base of resources with variable values of parameters with use of the RSS tab), knowledge bases (base of events - the beginning and the end of actions with use of the RAT tab and base of operations with use of the OPR tab) and bases of animation representations of results of simulation of FPS with use of the FRM and FUN tabs.
At the second stage the research of the created simulation model FPS by computer experiments with use of the bookmark SMR is conducted. Experiments continue until the desirable result is impossible. At the same time the number of runs is set by the experimenter. Results of a simulation model are represented by animation methods with use of the bookmark FRM.
This algorithm of imitating modeling is used at design of FPS of cutting of sheets on cards and cleanings of their surface.
Algorithm of simulation model FPM in the form of Petri Net. Control systems of complex systems in the form of FPS also refer to category difficultness and at introduction of FPS in real objects the particularly important becomes.
In this regard at simulation modeling of FPS, the research of its control algorithm computer experiments is a relevant task. With use of opportunities of the program RAO-studio complex the problem can be solved with the help of a temporary Petri net. At the same time the instrument of the automated modeling of a simulation model creates databases, knowledge and animation by means
of the corresponding RAO-studio tabs, namely: the generalized base on types of resources of network Petri Net in "RTP"; base of resources of a Petri net with variable values of parameters in "RSS"; base of events of a Petri net (the beginning and the end of actions) in "RAT"; base of operations of a Petri net (on. and off. resources with variable values of parameters) in "OPR"; base of execution of simulation modeling of a Petri net in "SMR"; base of reproduction of a simulation
Picture 3. Algorithm of a simulation model of FPS.
model of a Petri net in "FRM". Therefore, after execution of the listed procedures according to an algorithm of simulation modeling of FPS computer experiments consistently are conducted. Results of experiments of a simulation model of FPS are reproduced on the monitor screen animation in two-dimensional space. In parallel simulation experiments the control algorithm FPS of a temporary Petri net is also reproduced on the monitor screen in the form of columns schemes.
Remark. Having generalized stated on research FPS by simulation modeling, with the use of computer experiments in the RAO-studio environment at a stage of system-technic design, we will draw the following conclusions: it is meant that computer experiments with a simulation model of FPS functioning in ideal conditions without internal and external indignations; the purpose of creation and a research computer experiments of a simulation model of FPS is in estimating expediency of creation of FPS at the initial stage of design; reproduction of results of simulation with use of animation methods allows the user visually to trace during simulation the dynamic processes happening in computer experiments; reveal bottlenecks in structure of FPS which limit productivity of all system during functioning in the set interval; choice of the FPS elements (manipulators, drives, industrial robots, transport systems, etc.); the control algorithm FPS in the form of a temporary Petri net, also does not consider internal and external indignations; managing influences form after the set time delays, without confirmation of execution of the previous commands; as a result of computer experiments is defined by the user on what positions of the FPS elements sensors for identification of the current faults and also the sensors for the organization of feedback coupling, synchronization and coordination providing functioning of FPS in the set interval should be installed.
Apparently, the results of imitating research FPS unambiguously do not allow their application in real productions where emergency situations, such as change of power parameters in the set limits, emergencies, functions of mechatronic devices in the common work areas, climatic parameters (for example, temperature change, pressure of air and water, etc.), lack of materials for processing in FPS, etc. have to be considered. Therefore, taking into account results of a simulation model and the requirement of the environment of functioning of FPS development of the structurally functional scheme of a control system FPS and an algorithm of its management in the operating production is required.
Control system of FPS and algorithm of its management in the operating production. In the picture 4, structurally functional scheme FPS is shown. Taking into consideration the results of imitating modeling and requirements imposed to structures of FPS in the operating production, the
control algorithm is developed for functioning of FPS on the basis of production rules.It is known that functioning of a production system is presented in the form [5]:

where  – a current status of a system; – a current status of a system;  – a new system status after application of the production rule – a set of the production rules – a new system status after application of the production rule – a set of the production rules  - providing functioning of all system. - providing functioning of all system.
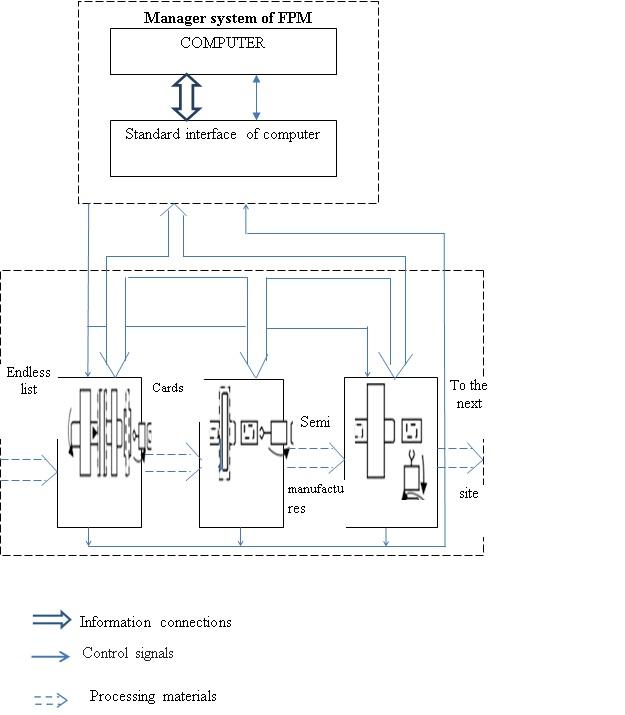
Picture 4. Structural – functional scheme of GPM
The production system consists of three main modules: global database (D); the knowledge base (KB) in the form of a set of production rules and the management system (MS).
The production system functions in the form of a situational dynamic system: on the basis of information arriving from a global IB production MS chooses the production rule which transfers GPM from current state to a new state from KB.
The global IB of GPM is formulated on the basis of information arriving from the sensors installed in various positions of the mechatronic devices, the capital and additional equipment and dynamically changes the state in various situations.
Observing the results of animation of a simulation model in the set interval, experts together with highly qualification specialists define positions where it is necessary install sensors (xi) for identification of the current situations and actuators for control of mechatronic devices (Ui). It is defined that for functioning of FPS, the global database should form on the basis of information arriving from 46 sensors of managing influences the 24 active mechanisms.
On the basis of information of a global IB is formulated KB in a look and production rules, with use of logical actions And, OR, NOT and implication in a look "IF are formulated … THAT …".
In a natural language the production rule is presented in the form:
IF on initial position TC1 there is a rolled leaf
And the table of PPM1 is in the lower situation
And the emphasis of PPM1 is in an operating position
And on final position TC1 there is no sheet 2
THAT is provided a condition of inclusion of TC1.
In internal language of the computer this production rule is presented in the form:

where , – number of the production rule. , – number of the production rule.
So on this way 34 production rules providing functioning of FPS were formulated. Forming productional rules considered collaboration of the mechatronic devices in various situations with the common work areas and prevention of emergency collisions of mechanical knots. Therefore, during the work of FPS the principles of asynchrony and parallelism of functioning the mechatronic devices are provided.
Conclusions.
1. The conceptual model of the site accepted as a research object and structurally functional GPS are developed.
2. The architecture of IAM of simulation model FPS in the RDO language with use of the bookmarks RAO-studio is offered and developed.
3. FPS control algorithm in the form of temporary network is developed Understand with use of the bookmarks RAO-studio.
4. FPS control algorithm in the operating production with use of results of a simulation model and control algorithm in the form of network is developed Understand.
5. FPS control algorithm in the operating production with use of results of a simulation model is developed and control algorithm in the form of Petri Net.
Библиография
1. Емельянов В.В., Ясиновский С.И. Имитационное моделирование систем: Учеб. пособие. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2009. С. 584: ил. (Информатика в техническом университете).
2. Ахмедова С.М., Магоммедли Х.М. Разработка алгоритма управления гибкого производственного модуля резки полуфабрикатов на карточки требуемых размеров на основе продукционных правил // «Научные известия» СГУ. 2015. том 15. № 4. С.72-77.
3. Ахмедов М.А., Ахмедова С.М. Разработка архитектуры инструмента автоматизированного проектирования имитационной модели гибкого производственного модуля // Системы управления и информационные технологии. 2015. №4.1(62). С. 104-107
4. Ахмедов М.А., Ахмедова С.М. Разработка алгоритма имитационного моделирования гибкой производственной системы с использованием программного комплекса RAO-studio на языке РДО // 62-я Международная научная конференция Астраханского государственного технического университета. Астрахань. 23-27 апреля 2018 года.
5. Искусственный интеллект – основа новой информационной технологии / Поспелов Г.С. –М.: Наука. 1988. С. 280: ил. (Сер. «Академические чтения»).
References
1. Emel'yanov V.V., Yasinovskii S.I. Imitatsionnoe modelirovanie sistem: Ucheb. posobie. – M.: Izd-vo MGTU im. N.E. Baumana, 2009. S. 584: il. (Informatika v tekhnicheskom universitete).
2. Akhmedova S.M., Magommedli Kh.M. Razrabotka algoritma upravleniya gibkogo proizvodstvennogo modulya rezki polufabrikatov na kartochki trebuemykh razmerov na osnove produktsionnykh pravil // «Nauchnye izvestiya» SGU. 2015. tom 15. № 4. S.72-77.
3. Akhmedov M.A., Akhmedova S.M. Razrabotka arkhitektury instrumenta avtomatizirovannogo proektirovaniya imitatsionnoi modeli gibkogo proizvodstvennogo modulya // Sistemy upravleniya i informatsionnye tekhnologii. 2015. №4.1(62). S. 104-107
4. Akhmedov M.A., Akhmedova S.M. Razrabotka algoritma imitatsionnogo modelirovaniya gibkoi proizvodstvennoi sistemy s ispol'zovaniem programmnogo kompleksa RAO-studio na yazyke RDO // 62-ya Mezhdunarodnaya nauchnaya konferentsiya Astrakhanskogo gosudarstvennogo tekhnicheskogo universiteta. Astrakhan'. 23-27 aprelya 2018 goda.
5. Iskusstvennyi intellekt – osnova novoi informatsionnoi tekhnologii / Pospelov G.S. –M.: Nauka. 1988. S. 280: il. (Ser. «Akademicheskie chteniya»).
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Предмет исследования – имитационное моделирование гибкой производственной системы раскроя листов на картах и очистки их поверхности на этапе системотехнического проектирования.
Методология исследования основана на сочетании теоретического и модельного подходов с применением методов анализа, имитационного моделирования, алгоритмизации, программирования, обобщения, сравнения, синтеза.
Актуальность исследования обусловлена широким распространением автоматизированных систем проектирования и подготовки производства в различных отраслях современной экономики и соответственно, необходимостью изучения и разработки способов имитационного моделирования производственных систем (в том числе гибких).
Научная новизна связана с разработкой авторами архитектуры имитационной модели ГПС на языке RDO с использованием RАО-studio, а также алгоритма управления производственной с системой. По результатам имитационного моделирования оптимизирован производственный процесс раскроя листов на картах и очистки их поверхности.
Стиль изложения научный. Статья написана английским литературным языком. При этом, по-видимому, авторы ссылается, в основном, на собственные работы, опубликованные ранее. Обсуждение результатов, их сопоставление с данными, полученными другими авторами (в том числе зарубежными) необходимо усилить.
Структура рукописи включает следующие разделы: Введение (структура проектирования объектов – планирование, научно-исследовательские работы, проектирование, производственные испытания, эксплуатация, жизненный цикл проекта, использование методов автоматизации в проектировании, опыт проектирования сложных объектов в виде гибких производственных систем (ГПС), множество динамических мехатронных устройств, перепроектирование в итерационном режиме, оценка целесообразности проектирования объекта на начальном этапе с использованием методов имитационного моделирования, анимация в двух-или трёхмерных пространствах, программный комплекс RАО-студия, разработка и отладка имитационных моделей на языке RDO, примере резки листового проката на листы и листов на картах, очистки их поверхности, использование сетей Петри), Концептуальная модель (резка рулонного листа на листы требуемого типоразмера, гильотинные ножницы, конвейер, резка листов на картах, устройство механической очистки, очистка поверхности карт, структурно-кинематическая схема, архитектура имитационной на языке RDO), алгоритм управления на основе производственных правил, исследование и оценка целесообразности создания ГПС в два этапа – создание баз данных, знаний, событий, операций, исследование созданной имитационной модели путём компьютерных экспериментов), Алгоритм построения имитационной модели ГПС в виде сети Петри (системы управления сложными системами, сеть Петри, алгоритм построения имитационной модели, компьютерные эксперименты), Замечание (компьютерные эксперименты функционируют в идеальных условиях без внутренних и внешних возмущений, оценка целесообразности создания ГПС на начальном этапе проектирования, воспроизведение результатов моделирования с использованием анимационных методов, выявление узких мест в структуре ГПС, управляющие воздействия формируются после заданных временных задержек, без подтверждения выполнения предыдущих команд, датчики для идентификации текущих неисправностей, организации обратной связи, синхронизации и координации, ограничение применения результатов имитационных исследований), Система управления ГПС и алгоритм её управления в действующем производстве (структурно-функциональная схема ГПС, алгоритм управления, производственная система – глобальная базы данных, база знаний в виде набора производственных правил, система управления, ситуационно-динамическая система, информация от 46 датчиков управляющих воздействий 24 активных механизмов, 34 производственных правила с использованием логических действий И, ИЛИ, НЕ и "если ... то ...", Выводы (заключение), Библиография.
Разделы «Алгоритм построения имитационной модели ГПС в виде сети Петри» и «Замечание» могут быть объединены.
Текст включает четыре рисунка. Точки в названиях рисунков нужно удалить. В названии рисунка 1 (Picture 1. Structural – cinematic scheme ГПМ; верно: Picture 1 – Structural-cinematic scheme of FPS) используются кириллические символы русского языка.
Содержание в целом соответствует названию. В то же время не ясно, реализована ли предлагаемая система в программном виде, каковы её основные производственные характеристики (в том числе в сопоставлении с известными аналогами). Результаты компьютерных экспериментов по имитационному моделированию не представлены. Примеры визуализации результатов экспериментов в виде дву- и трёхмерной анимации также не приведены. В формулировке заголовка, возможно, следует указать, что речь идёт о процессах раскроя листов на картах и очистки их поверхности.
Библиография включает пять источников отечественных авторов – монографии, учебные пособия, научные статьи, материалы научных мероприятий. Библиографические описания некоторых источников нуждаются в корректировке в соответствии с ГОСТ и требованиями редакции, например:
1. Емельянов В. В., Ясиновский С. И. Имитационное моделирование систем : учеб. пособие. М. : Изд-во МГТУ им. Н. Э. Баумана, 2009. 584 с.
2. Ахмедова С. М., Магоммедли Х. М. Разработка алгоритма управления гибкого производственного модуля резки полуфабрикатов на карточки требуемых размеров на основе продукционных правил // Научные известия СГУ. 2015. Т. 15. № 4. С. 72–77.
4. Ахмедов М. А., Ахмедова С. М. Разработка алгоритма имитационного моделирования гибкой производственной системы с использованием программного комплекса RAO-studio на языке РДО // 62-я Международная научная конференция Астраханского государственного технического университета. Астрахань, 2018. С. ???–???.
5. Поспелов Г. С. Искусственный интеллект – основа новой информационной технологии. М. : Наука, 1988. 280 с.
Возможно излишнее самоцитирование (Ахмедова С. М., Ахмедов М. А. с соавторами).
Апелляция к оппонентам (помимо учебной и общеизвестной литературы: Емельянов В. В., Ясиновский С. И., Поспелов Г. С.) не очевидна. Возможно, авторы обращаются, в основном, к собственным работам. В целом обсуждение полученных результатов, их сравнение с данными аналогичных исследований (как отечественных, так и зарубежных) необходимо усилить.
Аббревиатура «knowledge base» (KB) вводится дважды, «database» обозначается как (D), однако затем используется DB.Словосочетание «rules.It» создаёт ошибочное впечатление Интернет-адреса.
В целом рукопись соответствует основным требованиям, предъявляемым к научным статьям. Материал представляет интерес для читательской аудитории и после доработки может быть рассмотрен на предмет публикации в журнале «Программные системы и вычислительные методы».
|
 Рус
Рус



















