|
Электроника и электротехника
Правильная ссылка на статью:
Губанова А.А., Котковец С.А., Золотарев В.В.
Макет системы автоматической очистки воды с применением датчиков поплавкового типа на платформе Arduino Uno
// Электроника и электротехника.
2019. № 1.
С. 24-30.
DOI: 10.7256/2453-8884.2019.1.28803 URL: https://nbpublish.com/library_read_article.php?id=28803
Макет системы автоматической очистки воды с применением датчиков поплавкового типа на платформе Arduino Uno
Губанова Александра Анатольевна
преподаватель, Донской государственный технический университет.
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Gubanova Aleksandra Anatol'evna
Lecturer at Don State Technical University.
344000, Russia, Rostovskaya oblast', g. Rostov-Na-Donu, Gagarina, 1

|
anatoliya81@mail.ru
|
|
 |
Другие публикации этого автора
|
|
Котковец Сергей Анатольевич
не работает временно
344000, Россия, Ростовская область, г. Ростов-На-Дону, пл. Гагрина, 1
Kotkovets Sergei Anatol'evich
temporarily unemployed
344000, Russia, Rostovskaya oblast', g. Rostov-Na-Donu, pl. Gagrina, 1
|
|
1057967@rambler.ru
|
|
 |
|
Золотарев Владимир Владиславович
не работает временно
344000, Россия, Ростовская область, г. Ростов-На-Дону, ул. Пл. Гагрина, 1
Zolotarev Vladimir Vladislavovich
temporarily unemployed
344000, Russia, Rostovskaya oblast', g. Rostov-Na-Donu, ul. Pl. Gagrina, 1
|
|
vz.27@mail.ru
|
|
|
|
DOI: 10.7256/2453-8884.2019.1.28803
Дата направления статьи в редакцию:
28-01-2019
Дата публикации:
29-07-2019
Аннотация:
Объектом исследования в работе является созданная система автоматической чистки воды (макет) с применением датчиков поплавкового типа на платформе Arduino Uno, которая предназначена в качестве учебного материала при ознакомлении с датчиками поплавкового типа. В статье представлены разработанные схемы электрических соединений, на основе которых был создан алгоритм управления системой. Особое внимание в работе уделяется алгоритму работы системы, построенному на современной широкодоступной платформе Arduino Uno с применением контроллера ATmega328. В статье проводились теоретические и экспериментальные исследования, включающие работу с имитационными моделями и натурной установкой, а так же использовались стандартные методы программирования. Новизна исследования заключается в следующем: – в разработке макета и экспериментальном исследовании технологии очистки загрязненной воды; – в получении выходных характеристик разработанной системы, адекватно описывающих процессы очистки; - создании алгоритма и программного обеспечения на основании существующих подходов в области программирования.
Ключевые слова:
очистка воды, контроллер, платформа Arduino, датчик уровня воды, фильтр воды, падающий насос, учебный макет, уровень жидкости, силовой ключ, преобразователь напряжения
Abstract: The object of research in the work is the created system of automatic water cleaning (model) with the use of float-type sensors on the Arduino Uno platform, which is intended as a training material when familiarizing with float-type sensors. The article presents the developed schemes of electrical connections, on the basis of which the system control algorithm was created. Particular attention is paid to the algorithm of the system, built on a modern widely available platform Arduino Uno using the controller ATmega328. The article conducted theoretical and experimental studies, including work with simulation models and full-scale installation, as well as using standard programming methods. The novelty of the study is as follows:- in the development of the layout and experimental study of the technology of purification of contaminated water;- in obtaining the output characteristics of the developed system, adequately describing the cleaning processes;- creation of algorithms and software based on existing approaches in the field of programming.
Keywords: water purification, controller, the Arduino platform, water level sensor, water filter, falling pump, training layout, liquid level, power key, voltage converter
Очистка бытовых вод продолжает являться актуальной проблемой современности, решение которой связано с бурным развитием средств электроники и автоматики.
Содержащиеся в бытовых водах различные органические вещества, попадая в значительных количествах в водоёмы или скапливаясь в почве, могут быстро загнивать и ухудшать санитарное состояние водоёмов и атмосферы, способствуя распространению различных заболеваний. Поэтому вопросы очистки, обезвреживания и утилизации бытовых вод являются неотъемлемой частью проблемы охраны природы, оздоровления окружающей человека среды и обеспечения санитарного благоустройства городов и населённых пунктов.
В настоящее время существует большое множество различного рода установок для автоматической очистки воды [1]. Такие установки применяются не только в промышленности и медицине, но и в частных домах и офисах. Все они отличаются друг от друга сложностью реализации, методом очистки воды, габаритами, объёмом очистки воды в час и другими параметрами [2]. Принцип их функционирования заключается в том, что системы автоматического управления (САУ) в данных установках поддерживают в резервуаре оптимальный объём чистой воды, и в случае, когда этот уровень падает, пополняет резервуар с чистой водой из источника воды, очищая её [3]. Для реализации необходимого функционала САУ очистки воды должна иметь датчик уровня воды, фильтр для очистки воды, насос и резервуар для очистки воды (рисунок 1).
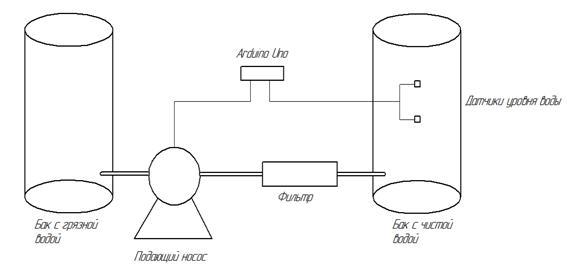
Рисунок 1 - Схема автоматизации системы автоматической очистки воды
Разработанный в данной работе макет очистки воды был создан для ознакомительных и учебных целей (рисунок 2). С помощью предлагаемого макета возможно изучить как принцип работы САУ очистки воды, так и принципы работы датчиков уровня воды. В макете были использованы поплавковые датчики, однако предусмотрена возможность использования других видов датчиков уровня воды, например, кондукторных, емкостных, ультразвуковых. Макет состоит из шести составляющих: подающий насос, фильтр, ArduinoUno, датчики уровня воды, бак для грязной воды и бак для чистой воды.
Принцип работы следующий: микроконтроллер считывает значение уровня воды с датчиков, находящихся в баке с чистой водой; если показатель воды ниже заданного, микроконтроллер включает насос, после включения насоса, из бака с грязной водой начинает поступать вода, и, проходя через фильтр, бак с чистой водой наполняется. После того, как уровень чистой воды в баке достигнет определённого уровня, микроконтроллер выключает насос.

Рисунок 2- Макет САУ очисткой воды
В качестве датчиков уровня воды был выбран поплавковый датчик уровня воды. Поплавковый датчик уровня воды используется в проектах, где необходимо измерить уровень жидкости в резервуаре. Данные датчики самые недорогие и не самые худшие по надежности [4]. Устройством управления – основой всей системы, является контроллер ArduinoUNOR3, построенный на основе ATmega328 микроконтроллера и обладающим множеством дискретных и аналоговых портов. Помимо этого, Arduino – открытая платформа, что в совокупности с большим количеством портов позволяет реализовать гибкую модульную систему, с возможностью модернизации и реализации дополнительных функций. Контроллер Arduino UNO R3 построен на основе чипа ATmega328 с тактовой частотой 16 МГц, обладает памятью 32кБ и имеет 20 контролируемых контактов ввода/вывода для взаимодействия с внешними устройствами.
Контроллер может работать при наличии напряжения от 6 до 20 В. Однако при напряжении менее 7В работа может быть неустойчивой, а напряжение более 12В может привести к повреждению. Поэтому рекомендуемый диапазон: 7−12 В.
Исполнительным устройством – является насос для подачи воды. В качестве насоса для подачи грязной воды к фильтру был выбран насос омывателя стекла автомобиля КАЛУГА ЭНЦ2512.В качестве фильтра для макета САУ воды выбран топливный фильтр LUXE 03Т. В качестве баков для воды были взяты стандартные автомобильные емкости для воды.
Подача управляющего сигнала для активации насоса подачи воды обеспечивается силовым ключом. Для разрабатываемой системы был выбран силовой ключ IRF520, основанный на одноимённом транзисторе. Данный преобразователь напряжения по всем характеристикам подходит для рассматриваемой САУ. Он обеспечивает управление нагрузкой, в качестве которой выступает клапан, с напряжением питания постоянного тока в диапазоне от 0 до 24 В и рабочий ток от 0 до 5, уровень управляющего сигнала, обеспечиваемый клапан находится в пределах от 5 до 20 В (выходной управляющий сигнал Arduino составляет 5 В) [5].
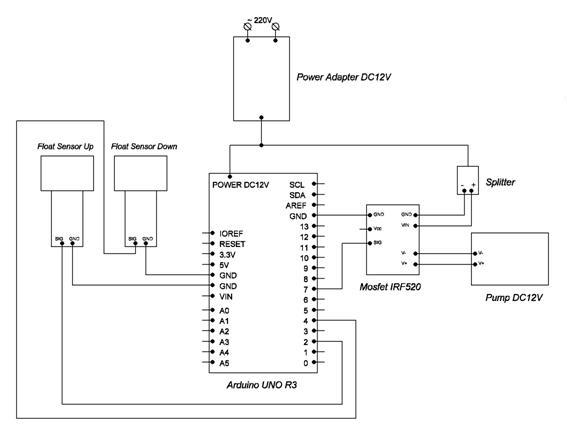
Рисунок 3 – Схема электрических соединений (с поплавковыми датчиками)
Датчик верхнего уровня использует второй дискретный вывод, конфигурируемый как вход (для приёма сигнала). Датчик нижнего уровня, аналогично верхнему, использует вывод в качестве входа, но подключен уже к четвертому пину.
Насос подключен к седьмому дискретному выводу, обозначенному как выход. Фильтр соединён с насосом с помощью трубки, по которой осуществляется поток фильтруемой воды. Каждый из ОУ, кроме фильтра, имеет свой вывод GND.
Питание системы осуществляется от одного БП с выходным напряжением DC12V и силой тока 4 А. Ток распараллеливается с помощью сплиттера, одна линия идёт на контроллер Arduino UNO R3, другая, для подачи питания на насос, схема электрических соединений системы представлена на рис. 2. Для подачи управляющего сигнала на насос, в системе имеется силовой ключ.
Помимо датчиков поплавкового типа (являющихся сигнализаторами) в системе также могут использоваться уровнемеры. Для реализации работы учебного стенда достаточно лишь одного датчика данного типа, который будет считывать текущий уровень жидкости и передавать на контроллер, где будет происходить сравнение с граничными уровнями. Схема электрических соединений с подключенным уровнемером представлена на рисунке 4.
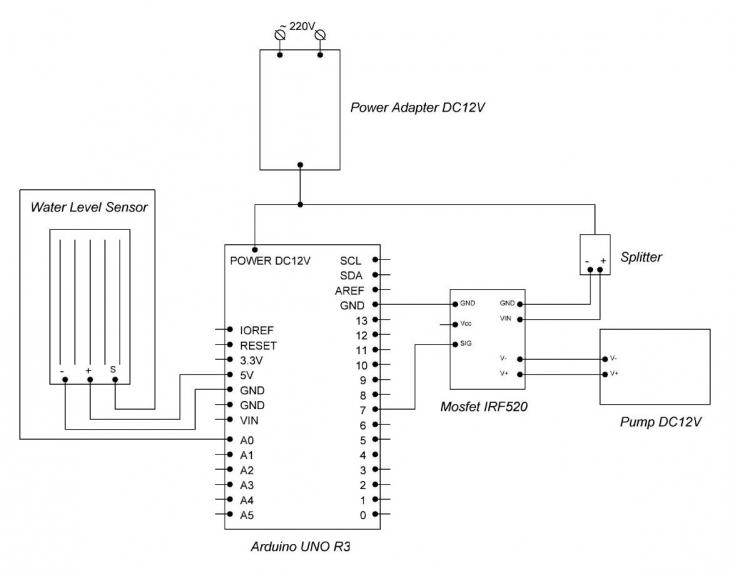
Рисунок 4 – Схема электрических соединений (с уровнемером)
Создание программы управления было осуществлено в интегрированной среде разработки ArduinoIDE [6]. Программа управления состоит из трех основных частей – подпрограмм.
В первой подпрограмме осуществляется объявление переменных, содержащих номера портов подключенных элементов САУ. Для поплавкового сенсора верхней границы присвоен второй дискретный вывод (переменная up_sensor_pin), для сенсора нижней границы – четвёртый дискретный вывод (переменная down_sensor_pin). Управление насосом осуществляется через седьмой дискретный вывод.
Вторая подпрограмма – Setup, осуществляет инициализацию используемых портов и передачи данных. Порт, отвечающий за датчик верхней границы жидкости, инициализирован как вход, причём через внутренний подтягивающий резистор[7]. Это сделано для того, чтобы не было неопределённости в состоянии датчика в реальном времени (0 или 1), так как резистор компенсирует малое напряжение на датчике.
Порт, отвечающий за датчик нижней границы, аналогично «верхнему», сконфигурирован как вход с использованием подтягивающего резистора.
Вывод насоса для подачи воды инициализирован как выход.
Третья подпрограмма – Loop, является основной. Она отвечает за принцип работы разрабатываемой системы. Также, в ней осуществляется вывод данных в монитор порта. Данная подпрограмма имеет ветвистую структуру, зависящую от выполнения определённых условий. Если на входах обоих датчиков зафиксирована логическая единица (т.е. датчики погружены в воду), то в монитор порты выводится надпись «БАК НАПОЛНЕН», и, в случае если работает насос, его питание прекращается. Обратно этому, когда на выходах обоих датчиков зафиксирован логический ноль – датчики не находятся в воде, в монитор порта поступает надпись «БАК ПУСТ», и подаётся питание на насос, для выполнения им подачи вода на фильтр. Если не одно из этих условий не зафиксировано, то подпрограмма Loop продолжает свою работу циклично, не изменяя стационарного состояния системы, до тех пор, пока не будет выполнено одно из двух описанных условий.
Для уровнемера условия аналогичны, но зависят от текущего уровня жидкости (изменения сопротивления на чувствительном элементе сенсора), на который погружен датчик уровня [8]. Сопротивление менее 250 – подаётся питание на насос, более 250 насос отключается.
Данная подпрограмма имеет ветвистую структуру, зависящую от выполнения определённых условий.
Представленная в статье система автоматической очистки воды с применением датчиков поплавкового типа на платформе Arduino Uno может считаться эффективной системой очистки, а применение широкодоступной и простой в работе элементной базы позволяет на примере макете изучить принцип работы датчиков и сам процесс бытовой очистки воды.
Библиография
1. Процессы и аппараты биотехнологической очистки сточных вод: Учебное пособие/Луканин А.В. - М.: НИЦ ИНФРА-М, 2016. - 242 с.
2. Физико-химические основы процессов очистки воды: Учебное пособие / Никифоров А.Ф., Кутергин А.С., Липунов И.Н., - 2-е изд., стер. - М.:Флинта, Изд-во Урал. ун-та, 2017. - 164 с.
3. Справочник по очистке природных и сточных вод. Водоснабжение и канализация / Спеллман Ф.Р., Алексеев М.И. - СПб:Профессия, 2014. - 1312 с.
4. Основы измерений. Датчики и электронные приборы: Учебное пособие / Клаассен К.Б., Воронов Е.В., Ларин А.Л., - 4-е изд. - Долгопрудный: Интеллект, 2012. - 352 с.
5. Arduino, датчики и сети для связи устройств: Пособие / Иго Т., Таранушенко С., - 2-е изд. - СПб:БХВ-Петербург, 2015. - 544 с.
6. Arduino и Raspberry Pi в проектах Internet of Things: Пособие / Петин В.А. - СПб:БХВ-Петербург, 2016. - 320 с.
7. Электроника. Логические микросхемы, усилители и датчики. Для начинающих: Пособие / Платт Ч. - СПб:БХВ-Петербург, 2015. - 448 с.
8. Технические средства автоматизации и управления: Учебное пособие / Старостин А.А., Лаптева А.В., - 2-е изд., стер. - М.:Флинта, 2017. - 168 с.
9. Разработка и макетирование микропроцессорных систем: Учебное пособие / Береснев А.Л., Береснев М.А. - Таганрог:Южный федеральный университет, 2016. - 106 с.
10. Технические средства автоматизации. Интерфейсные устройства и микропроцессорные средства: Учебное пособие / Беккер В. Ф. - 2-е изд. - М.: ИЦ РИОР, НИЦ ИНФРА-М, 2019. - 152 с.
References
1. Protsessy i apparaty biotekhnologicheskoi ochistki stochnykh vod: Uchebnoe posobie/Lukanin A.V. - M.: NITs INFRA-M, 2016. - 242 s.
2. Fiziko-khimicheskie osnovy protsessov ochistki vody: Uchebnoe posobie / Nikiforov A.F., Kutergin A.S., Lipunov I.N., - 2-e izd., ster. - M.:Flinta, Izd-vo Ural. un-ta, 2017. - 164 s.
3. Spravochnik po ochistke prirodnykh i stochnykh vod. Vodosnabzhenie i kanalizatsiya / Spellman F.R., Alekseev M.I. - SPb:Professiya, 2014. - 1312 s.
4. Osnovy izmerenii. Datchiki i elektronnye pribory: Uchebnoe posobie / Klaassen K.B., Voronov E.V., Larin A.L., - 4-e izd. - Dolgoprudnyi: Intellekt, 2012. - 352 s.
5. Arduino, datchiki i seti dlya svyazi ustroistv: Posobie / Igo T., Taranushenko S., - 2-e izd. - SPb:BKhV-Peterburg, 2015. - 544 s.
6. Arduino i Raspberry Pi v proektakh Internet of Things: Posobie / Petin V.A. - SPb:BKhV-Peterburg, 2016. - 320 s.
7. Elektronika. Logicheskie mikroskhemy, usiliteli i datchiki. Dlya nachinayushchikh: Posobie / Platt Ch. - SPb:BKhV-Peterburg, 2015. - 448 s.
8. Tekhnicheskie sredstva avtomatizatsii i upravleniya: Uchebnoe posobie / Starostin A.A., Lapteva A.V., - 2-e izd., ster. - M.:Flinta, 2017. - 168 s.
9. Razrabotka i maketirovanie mikroprotsessornykh sistem: Uchebnoe posobie / Beresnev A.L., Beresnev M.A. - Taganrog:Yuzhnyi federal'nyi universitet, 2016. - 106 s.
10. Tekhnicheskie sredstva avtomatizatsii. Interfeisnye ustroistva i mikroprotsessornye sredstva: Uchebnoe posobie / Bekker V. F. - 2-e izd. - M.: ITs RIOR, NITs INFRA-M, 2019. - 152 s.
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
В статье представлен макет системы автоматической очистки воды для учебных целей. Приведены: схема автоматизации на платформе Arduino UNO, алгоритмы управления и программа. В библиографии указаны всего 3 интернет-источника, что явно недостаточно.
В статье ошибочно система автоматического управления (САУ) квалифицируется, как АСУ, общепринятая расшифровка которой представляет Автоматизированную систему управления (предприятием, технологическим процессом и т.д.), в которой обязательно присутствует человек-оператор, чего нет в макете.
В место обзора существующих САУ с соответствующими ссылками на библиографию (обзоры, руководства по эксплуатации и т.д.), в статье превалируют «бытовые постулаты». Например, «В настоящее время существует большое множество различного рода систем (в данном случае правильнее - большое число установок, т.к. САУ лишь блок управления ими) для автоматической очистки воды (где ссылка?). Такие системы (правильнее-установки) применяются не только в промышленности и медицине, но и в частных домах и офисах. Все они отличаются друг от друга сложностью реализации, методом очистки воды, габаритами, объёмом очистки воды в час и другими параметрами (налицо все характеристики установок). Принцип их функционирования заключается в том, что данные системы (правильнее САУ в данных установках) поддерживают в резервуаре оптимальный объём чистой воды, и в случае, когда этот уровень падает, пополняет резервуар с чистой водой из источника воды, очищая её»(где ссылка?).
Уровни жидкостей в резервуарах измеряют разными датчиками (ультразвуковыми. емкостными и т.д.), а не только поплавковыми, которые являются дешевыми, но не самыми надежными.
По мнению рецензента, приведение листинга программы, выполненной в стандартной среде разработки ArduinoIDE, является лишним – достаточно описания первой, второй и третьей подпрограмм.
Статью необходимо переработать.
Результаты процедуры повторного рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Предмет исследования – разработка макета системы автоматической очистки воды для учебно-ознакомительных целей на платформе Arduino Uno (включая систему автоматического управления, программное обеспечение).
Методология исследования основана на сочетании теоретического, модельного и проектного подходов с применением методов анализа, схематизации, автоматизации, программирования, сравнения, обобщения, синтеза.
Актуальность исследования обусловлена широким распространением систем автоматического управления в различных отраслях современной экономики и, соответственно, необходимостью их изучения и разработки, в том числе в учебно-ознакомительных целях (на примере систем автоматической очистки воды).
Научная новизна автором в явном виде не выделена и, по-видимому, связана с разработкой системы автоматической очистки воды (включая программное обеспечение), на платформе Arduino Uno.
Стиль изложения научный. Статья написана русским литературным языком.
Структура рукописи включает следующие разделы (в виде отдельных пунктов не выделены, не озаглавлены): Введение (установки для автоматической очистки воды, системы автоматического управления (САУ), схема автоматизации системы автоматической очистки воды), Макет очистки воды (изучение принципа работы САУ очистки воды, датчиков уровня воды, поплавковые датчики, составляющие макета – подающий насос, фильтр, ArduinoUno, датчики уровня воды, бак для грязной воды и бак для чистой воды, принцип работы, контроллер ArduinoUNOR3, открытая платформа Arduino, насос омывателя стекла автомобиля КАЛУГА ЭНЦ2512, топливный фильтр LUXE 03Т, стандартные автомобильные ёмкости для воды, подача управляющего сигнала, силовой ключ IRF520, схема электрических соединений (с поплавковыми датчиками), программа управления в интегрированной среде разработки ArduinoIDE, подпрограммы – объявление переменных, содержащих номера портов подключенных элементов САУ, инициализация используемых портов и передачи данных, работа системы, Библиография.
Желательно дополнить рукопись заключением (выводами). Текст содержит три рисунка. Содержание рисунка 1 представляется тривиальным. Оформлять абзацы, состоящие из одного предложения, не следует.
Содержание в целом соответствует названию. В то же время в формулировке заголовка, возможно, нужно отразить, что макет системы автоматической очистки воды разработан для ознакомительных и учебных целей.
Библиография включает семь источников отечественных авторов – учебное пособие, Интернет-ресурсы. Библиографические описания некоторых источников нуждаются в корректировке в соответствии с ГОСТ и требованиями редакции, например:
2. Клаассен К. Б., Воронов Е. В., Ларин А. Л. Основы измерений. Датчики и электронные приборы : учебное пособие. – Долгопрудный : Интеллект, 2012. – 352 с.
3. Системы очистки воды для загородного дома: выбираем лучшую. – URL: https://www.kp.ru/guide/sistemy-ochistki-vody.html.
Для Интернет-ресурсов №№ 4–7 необходимо привести название на языке оригинала. Дублирование (полное библиографическое описание и URL) не целесообразно. Библиографические описания завершаются точкой.
Апелляция к оппонентам (Клаассен К. Б., Воронов Е. В., Ларин А. Л. и др.) имеет место в ограниченном объёме. Желательно обращение к более широкому спектру работ по теме проекта.
В целом содержание рукописи представляется (в части подхода к реализации разработки, принципа действия установки, её структуры и компонентов) общеизвестным. Объём текста больше подходит для тезисов доклада, нежели развёрнутой научной статьи. Материал может представлять интерес для читательской аудитории, однако в представленном виде в журнале «Электротехника и электроника» опубликован быть не может, поскольку нуждается в существенной доработке (в первую очередь – в части научной новизны, объёма, полноты и оформления библиографического списка).
|
 Рус
Рус













