|
DOI: 10.25136/2409-7543.2018.2.25744
Дата направления статьи в редакцию:
16-03-2018
Дата публикации:
26-04-2018
Аннотация:
Построение системы наблюдения за морским пространством для государственных органов требует, в том числе, обоснованного выбора ее элементов – источников информации. Предметом исследования является структура системы наблюдения за судами в морском пространстве. В настоящее время при множестве различных подходов к контролю морских судов, основанных как на сложных информационных системах, так и на самостоятельных технических средствах, с разными принципами действия, при выборе источников информации необходимо в первую очередь учитывать степень выполнения возложенных на него функций для решения задачи наблюдения и контроля. Выбор внедряемых источников информации должен учитывать степень выполнения функций контроля элементами существующей системы наблюдения. Методология исследования базируется на теоретических и эмпирических методах научного познания, в частности структурно-функциональный подход, методы анализа, синтеза, индукции, сравнения, изучение литературы и результатов деятельности. В статье автором предложена методика ранжирования источников информации для системы наблюдения за морским пространством. Предложенная методика обладает преимуществами по сравнению с существующими: методика учитывает не только технические параметры источников информации, но и степень выполнения возложенных на источник функций, необходимых для контроля безопасности морского пространства РФ; возможно сравнение источников информации с разной структурой и разным принципом действия с разнородными несравнимыми техническими характеристиками; методика учитывает состояние существующей системы наблюдения, куда может быть внедрен ранжируемый источник информации.
Ключевые слова:
морское пространственное планирование, система наблюдения, мониторинг, ранжирование, источник информации, судно, оптимизационная задача, безопасность морского пространства, технические средства наблюдения, эффективность функционирования
Abstract: Development of a maritime space surveillance system require from state authorities to make a reasonable choice of sources of information. The subject of this research is the surveillance system structure that allows to observe sea vessels. Providing that there is a great number of approaches to control over sea vessels that are based on both complex information systems and individual technical means, when selecting sources of information it is necessary to take into account functions that are to be performed by systems or means to observe and control over sea vessels. In particular, to select sources of information it is necessary to consider the performance of control functions by surveillance system elements. The research methodology is based on theoretical and empirical methods, in particular, structured fnctional approach, methods of analysis, synthesis, induction, comparison, literature analysis and performance analysis. In this research the author offers his own method of ranking information sources for maritime space surveillance. The method offered by the author has certain benefits compared to existing ones, in particular, the method allows to take into account not only technical parameters of information sources but also efficiency of control over maritime space of the Russian Federation. The method also allows to compare information sources with different structures and principles of operation as well as heterogenous incomparable technical features. The method also enables to consider the state of a surveillance system being used in which a ranked information source may be imbedded.
Keywords: marine spatial planning, surveillance system, monitoring, ranking, source of information, vessel, optimization task, the security of Maritime space, technical means of observation, the effectiveness of the implementation
Уже долгое время морское пространственное планирование (далее – МПП) в Российской Федерации (далее – РФ) находится на стадии разработки соответствующих законопроектов [3, 12] и осуществляется на основании нормативных документов общего характера [4, 5]. МПП лежит в основе безопасности человеческой жизни в море, экологической, экономической, транспортной, террористической и иной безопасности. Оно концентрирует свое внимание на разрешении потенциальных конфликтов при хозяйственном использовании акватории и сохранении морских экосистем, между различными природопользователями, конкурирующими за морское пространство.
Соблюдение принципов МПП различными типами судов, а также процессов, происходящих в морском пространстве, необходимо контролировать. Таким контролем занимаются государственные органы: в первую очередь это министерство обороны РФ министерство транспорта РФ, МЧС России, береговая охрана, Федеральное агентство по Рыболовству и другие [8]. Сбор данных деятельности судов в морском пространстве заинтересованными государственными органами ведется с помощью источников информации, представляющие собой как отдельные технические средства наблюдения за морским пространством, так и сложные информационные системы. Такими источниками информации являются: портовые радиолокационные станции (далее – РЛС) [9], автоматические идентификационные системы (далее – АИС) [1], оптикоэлектронные средства, системы космического мониторинга судов (например, СМС «Виктория» [11]), отраслевая система мониторинга водных биологических ресурсов, наблюдения и контроля за деятельностью промысловых судов (далее – ОСМ) [6, 7] и другие. Для оценки эффективности функционирования источников информации в морском пространстве, выбора состава и вариантов построения системы наблюдения в конкретных физико-географических, природно-климатических и иных условиях необходим соответствующий методический аппарат. В данной статье автором представлена методика ранжирования источников информации для системы наблюдения за морским пространством.
При МПП необходимо учитывать основные типы объектов (судов), производящих хозяйственную и иную деятельность в морском пространстве и возможные угрозы от них (таблица 1). Но с точки зрения технических возможностей источников информации данным типам судов соответствуют категории (таблица 2), характеризующие предусмотренные на судне технических средств контроля.
Таблица 1 – Основные типы судов, по виду деятельности и возможные исходящие от них угрозы
|
Основные типы судов в морском пространстве
|
Возможные угрозы
|
|
Маломерные плавсредства
|
Незаконный (прибрежный) вылов водных биологических ресурсов (далее – ВБР), нарушение правил МППСС [2] и пограничного режима [10]
|
|
Пассажирские суда
|
Повышенное внимание к безопасности пассажиров, нарушение правил МППСС [2]
|
|
Транспортные суда (суда, осуществляющие перевозку опасных грузов; танкера)
|
Нарушение экологии региона
|
|
Суда промыслового флота
|
Соблюдение экономических интересов России по вылову ВБР
|
|
Научно-исследовательские суда
|
Возможность ведения разведывательной деятельности на территории Российской Федерации
|
|
Иностранные военные корабли
|
Военная угроза
|
Таблица 2 – Категории судов с точки зрения установленных технических средств, влияющих на возможности наблюдения за ними
|
№ Кат.
|
Описание категории
|
Системы мониторинга
|
Суда, обязанные соответствовать
требованиям
|
|
1
|
Маломерные суда в территориальных водах, необорудованные техническими средствами контроля
|
______
|
______
|
|
2
|
Суда, совершающие переходы вне территориального моря, умышленно или по техническим причинам отключившие технические средства
|
______
|
______
|
|
3
|
Суда, оборудованные техническими средствами с ограниченным радиусом действия
|
Automatic Identification System (AIS) – автоматическая идентификационная система (далее – АИС)
|
все пассажирские суда; все танкера; все суда, совершающие международные рейсы тоннажем более 300 б.р.т.; все суда тоннажем более 500 б.р.т.
|
|
4
|
Суда, оборудованные системами спутникового слежения
|
Vessel Monitoring System (VMS) Victoria – система мониторинга судов (далее – СМС) «Виктория»;
АИС космос;
|
все крупные суда под флагом РФ
|
|
5
|
Суда, оборудованные техническими средствами контроля вылова ВБР
|
Отраслевая система мониторинга (далее – ОСМ)
|
суда мощностью 55 и более кВт и валовой вместимостью более 80 и более тон
|
В связи с тем, что многие источники информации специализированы только для одной из категорий судов и технические характеристики для разных категорий крайне разнятся, то производить оценку эффективности функционирования системы наблюдения в целом или источника информации по-отдельности целесообразно для одной выбранной категории при установленных условиях. При оценке эффективности источника информации необходимо учитывать степень выполнения возложенных на него функций в рамках поставленных задач, условий внешней среды, множество факторов и неопределенностей, пространственную и временную вероятность наблюдения, а также востребованность данного источника информации в существующей системе наблюдения. Рассмотрим множество источников информации системы наблюдения за морским пространством i = {1, …, n}. Принципам защиты экономических интересов и охраны границы можно поставить в соответствие показатели источников информации [14]:
1. Комплексность – количество функций j реализуемых i-м источником информации для k-й категории судов.
2. Непрерывность наблюдения – коэффициент  непрерывности использования i-го источника информации по пространству и времени. Характеризует способность функционирования источника информации по времени в рамках суток и по контролируемой площади. непрерывности использования i-го источника информации по пространству и времени. Характеризует способность функционирования источника информации по времени в рамках суток и по контролируемой площади.
3. Непрерывность по функциям – коэффициент  равномерности распределения пограничных средств по функции j. Максимизация данного показателя обеспечивает одновременное выполнение всех функций заданным набором источников информации Y, и минимизирует невыполнение одной из функции одновременно всеми источниками информации. равномерности распределения пограничных средств по функции j. Максимизация данного показателя обеспечивает одновременное выполнение всех функций заданным набором источников информации Y, и минимизирует невыполнение одной из функции одновременно всеми источниками информации.
1. Комплексность. Обозначим j= 0,…,5 функции, которые возложены на источники информации системы наблюдения [13] (таблица 3). Полный набор функций может быть изменен, в зависимости от поставленных задач, категории объекта и условий функционирования.
Таблица 3 – Основные функции источников информации для системы наблюдения
|
Функции источников информации
|
j
|
Пояснения, характеристика
|
Значение показателя функции
|
|
Функция сдерживания
|
1
|
Психологические воздействия на правонарушителей с целью отказа от противоправной деятельности или изменения способов действий
|

|
|
Функция своевременного обнаружения
|
2
|
Обнаружение, поиск судна с учетом времени и пространства
|

|
|
Функция распознавания
|
3
|
Идентификация судна, получение данных о владельце судна
|

|
|
Функция наведения
|
4
|
Возможность сопровождения судна с целью наведения на него сил и средств реализации
|

|
|
Функция фиксации признаков правонарушения
|
5
|
Обеспечивает доказательную базу при выявлении нарушений
|

|
Оценка значения показателей функции j производится в диапазоне от 0 до 1 для каждого источника информации i по каждой (или требуемой) категории k (рисунок 1). В случае невозможности расчета точной оценки значение функции является логическим («да/не», «1/0») и характеризует выполнения или невыполнения данной функции источника информации по выбранной категории судов. Для выбранного ряда функций автором предложен вариант их оценки.

Рисунок 1. Трехмерный массив оценки значения показателей функции j для каждого источника информации i по каждой категории k.
Функция сдерживания источника информации для потенциальных нарушителей пограничного режима, правил МПСС и незаконного вылова ВБР заключается в понимании капитаном судна технических возможностей функционирующих источников информации и последующей неизбежностью наказания. С учётом осведомлённости потенциальных нарушителей о средствах, имеющихся у государственных органов, а также тесного информационного взаимодействия потенциальных нарушителей между собой о новых источниках информации в регионе, значение показателя функции сдерживания стремится к единице для пары «источник информации» – «категория судна» в зоне функционирования источника информации, который способен выявить нарушение.
Функция своевременного обнаружения источника информации зависит от технической возможности обнаружения i-м источником информации судов k-ой категории и временных характеристик работы i-го источника информации и функционирования судов k-ой категории. Вероятность своевременного обнаружения  вычисляется по формуле (1). вычисляется по формуле (1).
|
 , ,
|
(1)
|
где:  – вероятность обнаружения i-м источником информации судна категории k; – вероятность обнаружения i-м источником информации судна категории k;  – коэффициент своевременности для i-го источника и k-ой категории объектов интереса. – коэффициент своевременности для i-го источника и k-ой категории объектов интереса.
|

|
(2)
|
где  – продолжительность цикла получения информации от i-го источника информации, соответствует времени обновления информации (например, около 20 сек. для РЛС и 4 часа для ОСМ); – продолжительность цикла получения информации от i-го источника информации, соответствует времени обновления информации (например, около 20 сек. для РЛС и 4 часа для ОСМ);  – время задержки поступления информации от i-го источника информации до потребителя (органа ФОИВ); – время задержки поступления информации от i-го источника информации до потребителя (органа ФОИВ);  – среднестатистическое время действия объекта контроля k-ой категории судов в рамках суток (например, от 2 часов для маломерного судна, ведущего незаконный прибрежный промысел и более суток для судов промыслового флота). – среднестатистическое время действия объекта контроля k-ой категории судов в рамках суток (например, от 2 часов для маломерного судна, ведущего незаконный прибрежный промысел и более суток для судов промыслового флота).
Вероятность обнаружения i-м источником информации объекта зависит от технической возможности i-го источника информации получать информации по объекту определенной категории k и определяется в соответствии с математическим аппаратом для данного типа источника информации (пример, алгоритм расчета вероятности обнаружения РЛС или алгоритм расчета вероятность обнаружения беспилотным летательным аппаратам (далее – БПЛА)), или в соответствии с тактико-техническими характеристиками.
Функция распознавания показывает возможность идентификации судна источником информации. Для тех источников, которые получают информацию от судов, оборудованными техническими средствами контроля, функция распознавания для данной категории судов выполняется полностью (например, ), но не выполняется для остальных категорий (например, ), но не выполняется для остальных категорий (например, ). Для источников информации, способных определить только лишь отдельные признаки объектов в морском пространстве (например, для РЛС – размер цели, тип цели по скорости) необходимо применить иной подход и установить значение показателя, соответствующее степени идентификации объекта по определяемым признакам. ). Для источников информации, способных определить только лишь отдельные признаки объектов в морском пространстве (например, для РЛС – размер цели, тип цели по скорости) необходимо применить иной подход и установить значение показателя, соответствующее степени идентификации объекта по определяемым признакам.
Функция наведения – логическая функция, соответствующая возможности источника информации при необходимости получать повторную своевременную (близкую к реальному времени) информацию о судне для обеспечения его поиска или непрерывного наведения сил и средств реализации (задержания, уничтожения и др.). Функцию наведения в полном объеме способны обеспечить источники информации регулярность поступления данных от которых, а также задержка передачи информации, стремится к нулю (например, РЛС и АИС). Информационные системы, обеспечивающие периодическую и достаточно редкую передачу информации от судна, данную функцию обеспечить не могут.
Логическая функция фиксации признаков нарушения показывает, является ли информация, полученная от источника доказательной базой при проведении разбирательств при выявлении факта нарушения.
Таким образом, источники информации i для системы наблюдения за морским пространством в зависимости от категории судов k способны реализовать одну или несколько функций j. Например, для группы судов, оборудованных техническими средствами контроля вылова ВБР (k = 5), источник информации ОСМ в разной степени выполняет функции тактического сдерживания, обнаружения, распознавания, фиксации признаков правонарушения. Показатель комплексности для i-го источника информации по объектам k-ой категории рассчитывается по формуле:
|

|
(3)
|
2. Непрерывность наблюдения. В зависимости от предназначения i-й источник информации в системе наблюдения за морским пространством характеризуется следующими параметрами:  – требуемое время использования источника информации по назначению, соответствующее суточному периоду возможности действия объекта k-ой категории (например, промысловая деятельность обычно ведется в светлое время суток, а переход пассажирского судна может совершаться круглосуточно); – требуемое время использования источника информации по назначению, соответствующее суточному периоду возможности действия объекта k-ой категории (например, промысловая деятельность обычно ведется в светлое время суток, а переход пассажирского судна может совершаться круглосуточно);  – реализуемое время, непрерывного функционирования источника информации по объекту поиска: – реализуемое время, непрерывного функционирования источника информации по объекту поиска:  (например, время непрерывной работы РЛС в соответствии с технической документацией); (например, время непрерывной работы РЛС в соответствии с технической документацией);  – требуемая площадь реализации для судов k-ой категории (площадь морского пространства, в которой категория объектов совершает своею деятельность); – требуемая площадь реализации для судов k-ой категории (площадь морского пространства, в которой категория объектов совершает своею деятельность);  – реализуема площадь i-го источника информации внутри требуемой площади реализации для судов k-ой категории (например, площадь покрытия зоны обнаружения РЛС в территориальном море для маломерных судов, рисунок 2). – реализуема площадь i-го источника информации внутри требуемой площади реализации для судов k-ой категории (например, площадь покрытия зоны обнаружения РЛС в территориальном море для маломерных судов, рисунок 2).
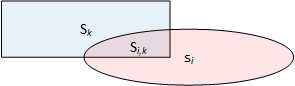
Рисунок 2 – Реализуема площадь i-го источника информации внутри требуемой площади реализации для судов k-ой категории (область пересечения фигур)
Соответственно, коэффициент непрерывности функционирования i-го источника информации для судов k-й категории судов вычисляется по формуле (4).
|

|
(4)
|
3. Непрерывность по функциям. В соответствии с принципом слабого звена (целостность любой системы определяется устойчивостью ее наиболее слабого элемента) одинаково важно обеспечить реализацию всех функций в рамках состава конкретной системы наблюдения (таблица 3). Степень реализации функции j всеми источниками информации для категории судов k (рисунок 1) определяется по формуле:
|

|
(5)
|
Полагая, что качество реализации любой функции существенно зависит от наличия разнообразных источников информации, коэффициент непрерывности можно определить как минимальную степень реализации каждой функции по k-ой категории судов.
|
|
(6)
|
Для ранжирования источников информации i по эффективности функционирования в системе наблюдения Y по судам категории k получаем многокритериальную задачу оптимизации (7). В данной задаче не введен показатель стоимости источника информации в связи с разнотипностью источников информации. Решение полученной оптимизационной задачи возможно различными известными методами: Парето, Борда, Вальда, Севиджа, Гурвица и другими.
Таким образом, автором представлена методика ранжирования источников информации для системы наблюдения за морским пространством. Предложенная методика обладает преимуществами по сравнению с существующими:
1. Методика учитывает не только технические параметры источников информации, но и степень выполнения возложенных на источник функций, необходимых для контроля безопасности морского пространства РФ.
2. Возможно сравнение источников информации с разной структурой (самостоятельные технические средства наблюдения или информационные системы) и разным принципом действия с разнородными несравнимыми техническими характеристиками.
3. Методика учитывает состояние существующей системы наблюдения, куда может быть внедрен ранжируемый источник информации.
Предложенная методика была применена на примере бассейна Баренцева моря при ранжировании широко применяемых источников информации разного типа и принципа действия: РЛС «Буссоль-С», АИС (источник рассматривается с точки зрения приема, обработки, декодирования и отображения информации, передаваемой внешними устройствами АИС в УКВ диапазоне ), оптико-электронный модуль «Фокус-Д» (далее – ОЭМ), СМС «Виктория», АИС-космос (источник рассматривается как информационная система, получающая данные от внешних устройств АИС через аппаратуру ГМССБ), ОСМ; а также специализированных и перспективных источников информации: беспилотная авиационная система «Птеро-G1», загоризонтная радиолокационная станция поверхностной волны «Лагуна» (далее – ЗГ РЛС).
При расчетах для категорий судов и для источников информации использовались средние значения параметров при нормальных условиях среды или параметры из технической документации (таблицы 4 – 5). В расчетах имеются определенные допущения, описание которых в рамках статьи не возможно в связи с ограниченностью объема материала. Для вычисления показателя непрерывности наблюдения были рассчитаны площади районов деятельности категорий судов , а также реализуема площадь i-го источника информации внутри требуемой площади реализации.
Таблица 4 – Параметры судов, взятые для расчета
|
Параметр
j
|
Единица
измерения
|
Категория судов, k
|
|
1
|
2
|
3
|
4
|
5
|
|
|
час.
|
2-12
|
>24
|
>24
|
>24
|
>24
|
|
|
час.
|
12
|
24
|
24
|
24
|
12
|
|
|
кв. км.
|
7404
|
624804
|
289365
|
289365
|
624804
|
Таблица 5 – Параметры источников информации, взятые для расчета
|
Параметр
j
|
Ед.изм.
|
k
|
Источники информации, i
|
|
РЛС
|
АИС
|
ОЭМ
|
СМС
|
АИС
космос
|
ОСМ
|
БПЛА
|
ЗГ РЛС
|
|
|
|
|
3 сек
|
1-6 мин
|
0
|
12 час
|
12 час
|
6 час
|
0
|
1 мин*
|
|
|
час
|
|
0
|
0
|
0
|
1
|
1
|
1
|
0-8
|
0
|
|
|
|
|
0,8
|
1
для k=3
|
0,8*
|
1
для k=4
|
1
для k=4
|
1
для k=5
|
0,9*
|
0,1-0,8
|
|
|
час.
|
|
24
|
24
|
4
|
24
|
24
|
24
|
8
|
24
|
|
|
кв. км.
|
1
|
398
|
0
|
104
|
0
|
0
|
0
|
1000
|
0
|
|
2
|
1186
|
0
|
801
|
0
|
0
|
0
|
1000
|
163446
|
|
3
|
1376
|
8602
|
1009
|
0
|
0
|
0
|
1000
|
110547
|
|
4
|
1694
|
0
|
1455
|
289365
|
289365
|
0
|
1000
|
110547
|
|
5
|
1250
|
0
|
833
|
0
|
0
|
624804
|
1000
|
163446
|
* использованы неподтверждённые данные. Расчет значения параметра нуждается в уточнении.
В соответствии методикой рассчитаны показатели эффективности функционирования источников информации по категориям объектов k.
Таблица 6 – Значения показателей комплексности
|
Категория
судна
|
Источники информации
|
|
РЛС
|
АИС
|
ОЭМ
|
СМС
|
АИС
космос
|
ОСМ
|
БПЛА
|
ЗГ РЛС
|
|
1
|
3,90
|
0
|
3,00
|
0
|
0
|
0
|
3,21
|
2,20
|
|
2
|
3,90
|
0
|
3,00
|
0
|
0
|
0
|
3,39
|
3,90
|
|
3
|
3,90
|
4,99
|
3,00
|
0
|
0
|
0
|
3,39
|
3,90
|
|
4
|
3,90
|
0
|
3,00
|
3,65
|
3,65
|
0
|
3,39
|
3,90
|
|
5
|
2,90
|
0
|
2,00
|
0
|
0
|
3,77
|
3,39
|
3,90
|
Таблица 7 – Коэффициент непрерывного функционирования источников информации
|
Категория
судна
|
Источники информации
|
|
РЛС
|
АИС
|
ОЭМ
|
СМС
|
АИС
космос
|
ОСМ
|
БПЛА
|
ЗГ РЛС
|
|
1
|
0,11
|
0
|
0
|
0
|
0
|
0
|
0,09
|
0
|
|
2
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0,26
|
|
3
|
0
|
0,03
|
0
|
0
|
0
|
0
|
0
|
0,38
|
|
4
|
0,01
|
0
|
0
|
1,00
|
1,00
|
0
|
0
|
0,38
|
|
5
|
0
|
0
|
0
|
0
|
0
|
2,00
|
0
|
0,52
|
Таблица 8 – Степень реализации функции j всеми источниками информации системы наблюдения для категории судов k определяется по формуле
|
Категория
судна
|
Функция источника информации j
|

|

|
|
1
|
2
|
3
|
4
|
5
|
|
1
|
2,00
|
2,21
|
0,60
|
3,50
|
3,00
|
0,60
|
0,60
|
|
2
|
2,00
|
3,09
|
0,60
|
3,50
|
3,00
|
0,60
|
0,60
|
|
3
|
3,00
|
4,07
|
1,60
|
4,50
|
4,00
|
1,60
|
|
|
4
|
4,00
|
4,38
|
2,60
|
3,50
|
5,00
|
2,60
|
|
|
5
|
1,00
|
3,86
|
1,60
|
3,50
|
4,00
|
1,00
|
|
Для выбора оптимальных источников информации для системы наблюдения из перечня по рассчитанным выше по предложенной автором методике показателям воспользуемся правилом выбора по Парето. Согласно методу Парето лучшим является тот вариант, который по всем показателям был бы не хуже первого, а хотя бы по одному показателю лучше него. Для примера проранжируем источники информации для судов категории k = 2 (суда, совершающие переходы вне территориального моря, умышленно или по техническим причинам отключившие технические средства). Так как в примере мы ранжируем источники информации независимо от системы наблюдения в целом (другие источники информации в системе наблюдения отсутствуют), то показатель непрерывности по функциям при ранжировании будет соответствовать  – минимальному значению степени реализации какой-либо функции j ранжируемым источником информации для категории судов k = 2. К реализации предложены пять альтернативных источников информации, сравниваемых по основным показателям (таблица 9). Произведем ранжирование данных источников информации по предложенным критериям (таблица 10). – минимальному значению степени реализации какой-либо функции j ранжируемым источником информации для категории судов k = 2. К реализации предложены пять альтернативных источников информации, сравниваемых по основным показателям (таблица 9). Произведем ранжирование данных источников информации по предложенным критериям (таблица 10).
|
Таблица 9 – Значения сравниваемых показателей источников информации для k = 2.
|
№
i
|
Источники
информации
|

|

|

|
|
1
|
РЛС
|
3,9
|
0
|
0,1
|
|
2
|
АИС
|
0
|
0
|
0
|
|
3
|
ОЭМ
|
3
|
0
|
0
|
|
4
|
СМС
|
0
|
0
|
0
|
|
5
|
АИС космос
|
0
|
0
|
0
|
|
6
|
ОСМ
|
0
|
0
|
0
|
|
7
|
БПЛА
|
3,39
|
0
|
0,2
|
|
8
|
ЗГ РЛС
|
3,9
|
0,26
|
0,1
|
|
Таблица 10 – Ранжирование сравниваемых источников информации
|
Ранги
|
|
|
|
|
1
|
РЛС
|
ЗГ РЛС
|
БПЛА
|
|
2
|
ЗГ РЛС
|
РЛС
|
РЛС
|
|
3
|
БПЛА
|
АИС
|
ЗГ РЛС
|
|
4
|
ОЭМ
|
ОЭМ
|
АИС
|
|
5
|
АИС
|
СМС
|
ОЭМ
|
|
6
|
СМС
|
АИС
космос
|
СМС
|
|
7
|
АИС
космос
|
ОСМ
|
АИС
космос
|
|
8
|
ОСМ
|
БПЛА
|
ОСМ
|
|
На следующем этапе проведем сравнительный анализ источников информации по данным показателям. Применяя метод Парето, составим таблицы предпочтений (таблица 11) следующим образом: например, для источника информации «РЛС» в клетку пересечения строки «» и столбца «БПЛА» поставим символ «+», если значение по проекту «РЛС» больше, чем по проекту «БПЛА», символ «-», если меньше, знак «0», если значения равны.
Таблица 11 – Таблицы предпочтений по правилу Парето.
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
|
РЛС
|
АИС
|
ОЭМ
|
СМС
|
АИС
космос
|
ОСМ
|
БПЛА
|
ЗГ РЛС
|
|
|
+
|
+
|
+
|
+
|
+
|
+
|
0
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
-
|
|
|
-
|
-
|
-
|
-
|
-
|
-
|
0
|
|
|
2
|
1
|
3
|
4
|
5
|
6
|
7
|
8
|
|
|
-
|
-
|
0
|
0
|
0
|
-
|
-
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
-
|
|
|
-
|
0
|
0
|
0
|
0
|
-
|
-
|
|
|
3
|
1
|
2
|
4
|
5
|
6
|
7
|
8
|
|
|
-
|
+
|
+
|
+
|
+
|
-
|
-
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
-
|
|
|
-
|
0
|
0
|
0
|
0
|
-
|
-
|
|
|
4
|
1
|
2
|
3
|
5
|
6
|
7
|
8
|
|
|
-
|
0
|
-
|
0
|
0
|
-
|
-
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
-
|
|
|
-
|
0
|
0
|
0
|
0
|
-
|
-
|
|
|
5
|
1
|
2
|
3
|
4
|
6
|
7
|
8
|
|
|
-
|
0
|
-
|
0
|
0
|
-
|
-
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
-
|
|
|
-
|
0
|
0
|
0
|
0
|
-
|
-
|
|
|
6
|
1
|
2
|
3
|
4
|
5
|
7
|
8
|
|
|
-
|
0
|
-
|
0
|
0
|
-
|
-
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
-
|
|
|
-
|
0
|
0
|
0
|
0
|
-
|
-
|
|
|
7
|
1
|
2
|
3
|
4
|
5
|
6
|
8
|
|
|
-
|
+
|
+
|
+
|
+
|
+
|
-
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
-
|
|
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
8
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
|
|
0
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
+
|
+
|
+
|
+
|
+
|
+
|
+
|
|
|
0
|
+
|
+
|
+
|
+
|
+
|
-
|
|
Принимая во внимание определение правила выбора по Парето, получаем, что в данном случае выбирается (предпочтительнее других вариантов) тот источник информации, которому в таблице 11 соответствуют столбцы, не содержащие символа «-». Наличие в таблице 11 для источника информации «ОЭМ (3)» столбца «АИС (2)», не имеющего ни одного знака «-» и хотя бы один знак «+», означает, что источник информации «ОЭМ» превосходит источник «АИС». Для источников информации 1, 2, 3, 4, 5, 6 есть источники (7, 8), имеющие преимущество. Таким образом, при заданных параметрах и условиях источники информации БПЛА и ЗГ РЛС наиболее эффективны для судов 2-й категории, и относятся к первому рангу Паретооптимального множества. Для выявления остальных рангов, процедуру ранжирования необходимо повторить, исключив из нее источники первого ранга.
Библиография
1. ISO/IEC 62287-1:2017 Maritime navigation and radiocommunication equipment and systems – Class B shipborne equiment of the automatic identification system (AIS) – Part 1: Carriersense time division multiple access (CSTDMA) techniques. [Электронный ресурс] – URL: https://webstore.iec.ch/publication/60384 (дата обращения 20.03.2018)
2. Международные правила предупреждения столкновения судов в море, 1972 г. (МПСС-72). – 5-е изд. испр. – М: МОРКНИГА, 2011. – 156 с., 142 ил.
3. Митягин С.Д. Морское планирование – новое направление пространственной организации Российской Федерации // Журнал «Вестник «Зодчий XXI век». ; 4 (45), 2012 г. [Электронный ресурс] – URL: http://niipgrad.spb.ru/scientific_Publications/Morskoye-planirovaniye.html (дата обращения 20.03.2018)
4. Морская доктрина Российской Федерации / утверждена Президентом РФ 26 июля 2015 г.
5. Основы государственной политики Российской Федерации в Арктике на период до 2020 года и дальнейшую перспективу. (утверждены Президентом Российской Федерации Дмитрием Медведевым 18 сентября 2008 г. (Пр-1969). URL: www.rg.ru/2009/03/30/arktika-osnovy-dok.html (18.08.2013)
6. Постановление правительства РФ от 24 декабря 2008 г. № 994 «Об утверждении Положения об осуществлении государственного мониторинга водных биологических ресурсов и применения его данных».
7. Постановление правительства РФ от 26 февраля 1999 г. № 226 «О создании отраслевой системы мониторинга водных биологических ресурсов, наблюдения и контроля за деятельностью промысловых судов».
8. Постановление Правительства РФ от 29 августа 2014 г. № 874 «О пилотном проекте по созданию межведомственных региональных информационно-координационных центров в гг. Мурманске и Петропавловске-Камчатском».
9. Приказ Минтранса РФ от 23 июля 2015 г. № 226 «Об утверждении Требований к радиолокационным системам управления движения судов, объектам инфраструктуры морского порта, необходимым для функционирования Глобальной морской системы связи при бедствии и для обеспечения безопасности, объектам и средствам автоматической информационной системы, службе кон6троля судоходства и управления судоходством» // СПС КонсультантПлюс.
10. Приказ ФСБ РФ от 7 августа 2017 г. № 454 «Об утверждении Правил пограничного режима» // СПС КонсультантПлюс.
11. Система мониторинга судов «Виктория» [Электронный ресурс]. URL: http://lrit.ru/_rus/victoria.html/ (дата обращения: 20.03.2018).
12. Чарльз Н. Эйлер. Обзор мирового опыта в области морского пространственного планирования. [Электронный ресурс] – URL: https://www.academia.edu/29690204/обзор_мирового_опыта_в_области_морского_пространственного_планирования.html (дата обращения 20.03.2018)
13. Шумов В.В. Введение в методологию погранологии и погранометрики / Под ред. и с предисл. В. А. Дмитриева. М.: ЛИБРОКОМ, 2013. 200 с.
14. Шумов В.В. Пограничная безопасность как ценность и общественное благо: Математические модели. – М.: ЛЕНАНД, 2015. – 184 с
References
1. ISO/IEC 62287-1:2017 Maritime navigation and radiocommunication equipment and systems – Class B shipborne equiment of the automatic identification system (AIS) – Part 1: Carriersense time division multiple access (CSTDMA) techniques. [Elektronnyi resurs] – URL: https://webstore.iec.ch/publication/60384 (data obrashcheniya 20.03.2018)
2. Mezhdunarodnye pravila preduprezhdeniya stolknoveniya sudov v more, 1972 g. (MPSS-72). – 5-e izd. ispr. – M: MORKNIGA, 2011. – 156 s., 142 il.
3. Mityagin S.D. Morskoe planirovanie – novoe napravlenie prostranstvennoi organizatsii Rossiiskoi Federatsii // Zhurnal «Vestnik «Zodchii XXI vek». ; 4 (45), 2012 g. [Elektronnyi resurs] – URL: http://niipgrad.spb.ru/scientific_Publications/Morskoye-planirovaniye.html (data obrashcheniya 20.03.2018)
4. Morskaya doktrina Rossiiskoi Federatsii / utverzhdena Prezidentom RF 26 iyulya 2015 g.
5. Osnovy gosudarstvennoi politiki Rossiiskoi Federatsii v Arktike na period do 2020 goda i dal'neishuyu perspektivu. (utverzhdeny Prezidentom Rossiiskoi Federatsii Dmitriem Medvedevym 18 sentyabrya 2008 g. (Pr-1969). URL: www.rg.ru/2009/03/30/arktika-osnovy-dok.html (18.08.2013)
6. Postanovlenie pravitel'stva RF ot 24 dekabrya 2008 g. № 994 «Ob utverzhdenii Polozheniya ob osushchestvlenii gosudarstvennogo monitoringa vodnykh biologicheskikh resursov i primeneniya ego dannykh».
7. Postanovlenie pravitel'stva RF ot 26 fevralya 1999 g. № 226 «O sozdanii otraslevoi sistemy monitoringa vodnykh biologicheskikh resursov, nablyudeniya i kontrolya za deyatel'nost'yu promyslovykh sudov».
8. Postanovlenie Pravitel'stva RF ot 29 avgusta 2014 g. № 874 «O pilotnom proekte po sozdaniyu mezhvedomstvennykh regional'nykh informatsionno-koordinatsionnykh tsentrov v gg. Murmanske i Petropavlovske-Kamchatskom».
9. Prikaz Mintransa RF ot 23 iyulya 2015 g. № 226 «Ob utverzhdenii Trebovanii k radiolokatsionnym sistemam upravleniya dvizheniya sudov, ob''ektam infrastruktury morskogo porta, neobkhodimym dlya funktsionirovaniya Global'noi morskoi sistemy svyazi pri bedstvii i dlya obespecheniya bezopasnosti, ob''ektam i sredstvam avtomaticheskoi informatsionnoi sistemy, sluzhbe kon6trolya sudokhodstva i upravleniya sudokhodstvom» // SPS Konsul'tantPlyus.
10. Prikaz FSB RF ot 7 avgusta 2017 g. № 454 «Ob utverzhdenii Pravil pogranichnogo rezhima» // SPS Konsul'tantPlyus.
11. Sistema monitoringa sudov «Viktoriya» [Elektronnyi resurs]. URL: http://lrit.ru/_rus/victoria.html/ (data obrashcheniya: 20.03.2018).
12. Charl'z N. Eiler. Obzor mirovogo opyta v oblasti morskogo prostranstvennogo planirovaniya. [Elektronnyi resurs] – URL: https://www.academia.edu/29690204/obzor_mirovogo_opyta_v_oblasti_morskogo_prostranstvennogo_planirovaniya.html (data obrashcheniya 20.03.2018)
13. Shumov V.V. Vvedenie v metodologiyu pogranologii i pogranometriki / Pod red. i s predisl. V. A. Dmitrieva. M.: LIBROKOM, 2013. 200 s.
14. Shumov V.V. Pogranichnaya bezopasnost' kak tsennost' i obshchestvennoe blago: Matematicheskie modeli. – M.: LENAND, 2015. – 184 s
|
 Рус
Рус











